
Volume 16, Issue 1 (January & February 2025)
BCN 2025, 16(1): 143-158 |
Back to browse issues page



Download citation:
BibTeX | RIS | EndNote | Medlars | ProCite | Reference Manager | RefWorks
Send citation to:



BibTeX | RIS | EndNote | Medlars | ProCite | Reference Manager | RefWorks
Send citation to:
Rezaee Z, Akbarzadeh-T. M. Uncertainty Management in the Dynamics of Biological Systems: A Key to Goal-oriented Rehabilitation. BCN 2025; 16 (1) :143-158
URL: http://bcn.iums.ac.ir/article-1-2989-en.html
URL: http://bcn.iums.ac.ir/article-1-2989-en.html



1- Biomedical Engineering Group, Department of Electrical Engineering, Center of Excellence on Soft Computing and Intelligent Information Processing (SCIIP), Ferdowsi University of Mashhad, Mashhad, Iran.
Keywords: Rehabilitation, Gait performance, Fuzzy control, Knowledge management, Imprecision tolerance, Functional electrical stimulation (FES)
Full-Text [PDF 4886 kb]
| Abstract (HTML)
Control strategy
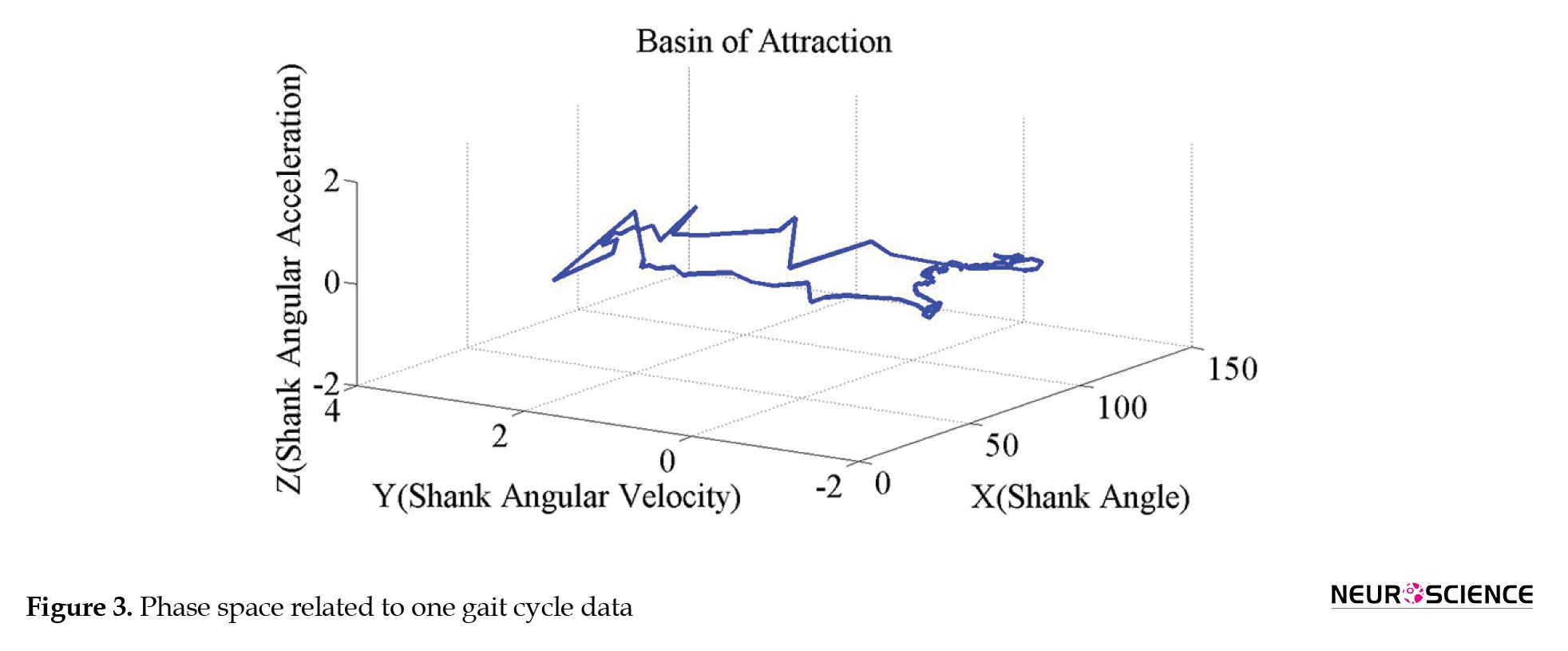
In this study, four main steps are taken to design the controller. The first step is to plot and reconstruct the phase space of the system based on drawing the shank angle, the shank angular velocity, and the shank angular acceleration relative to each other (Figure 3).
Simulation and analysis
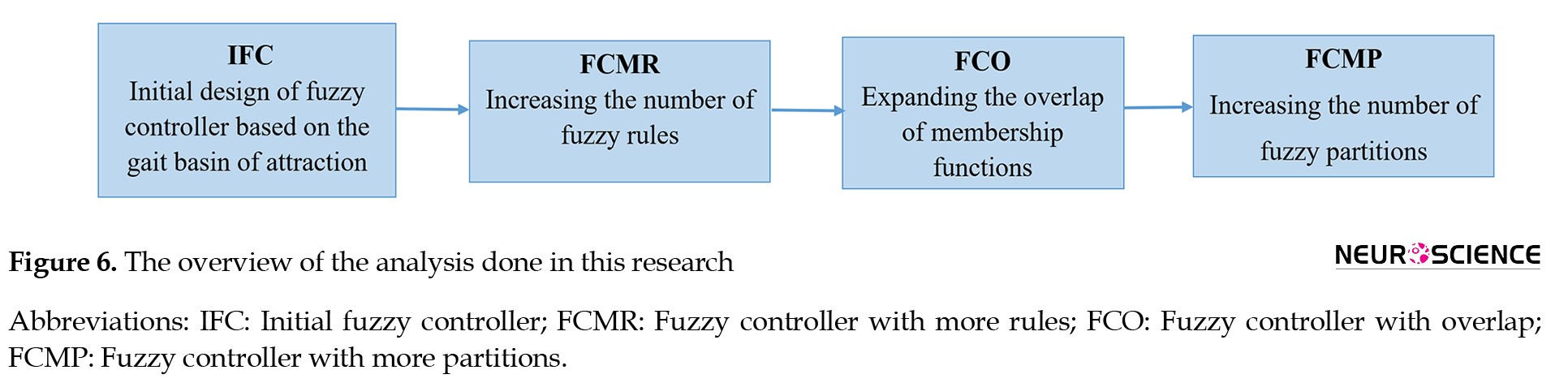
In this section, we examine the effects of handling existing uncertainties and imprecisions in the gait dynamics on the control quality by increasing the number of fuzzy rules, expanding the overlap of membership functions, and increasing the number of fuzzy partitions. The research process is shown in Figure 6.
The initial design of the fuzzy controller
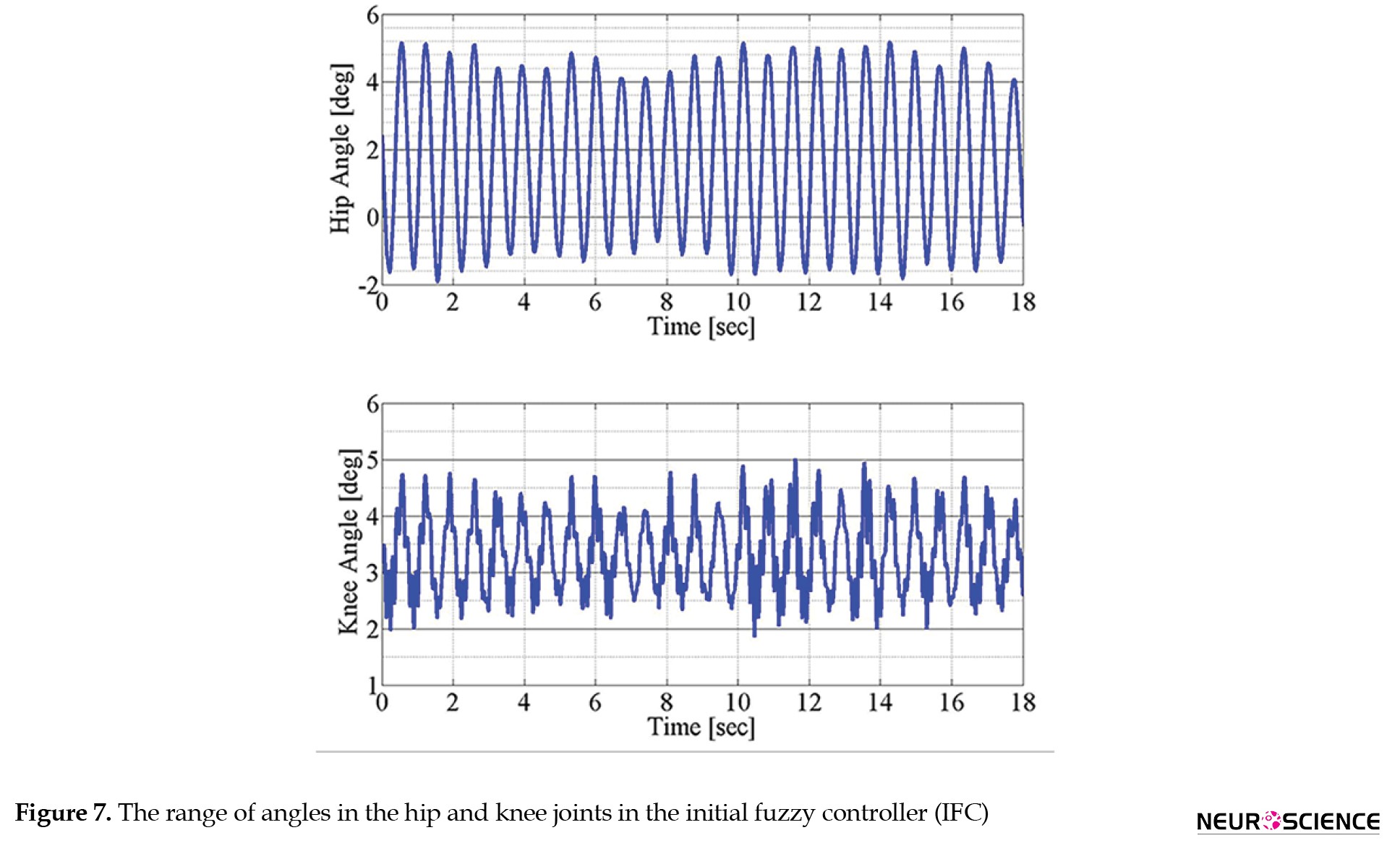
In the first step, we designed a fuzzy controller with five membership functions in each input and output, without overlap, and five fuzzy rules. As seen in Figure 7, the angles obtained in the hip and knee joints are abnormal due to the crisp behavior of the controller, and the model output has distortion.
Increasing the number of fuzzy rules
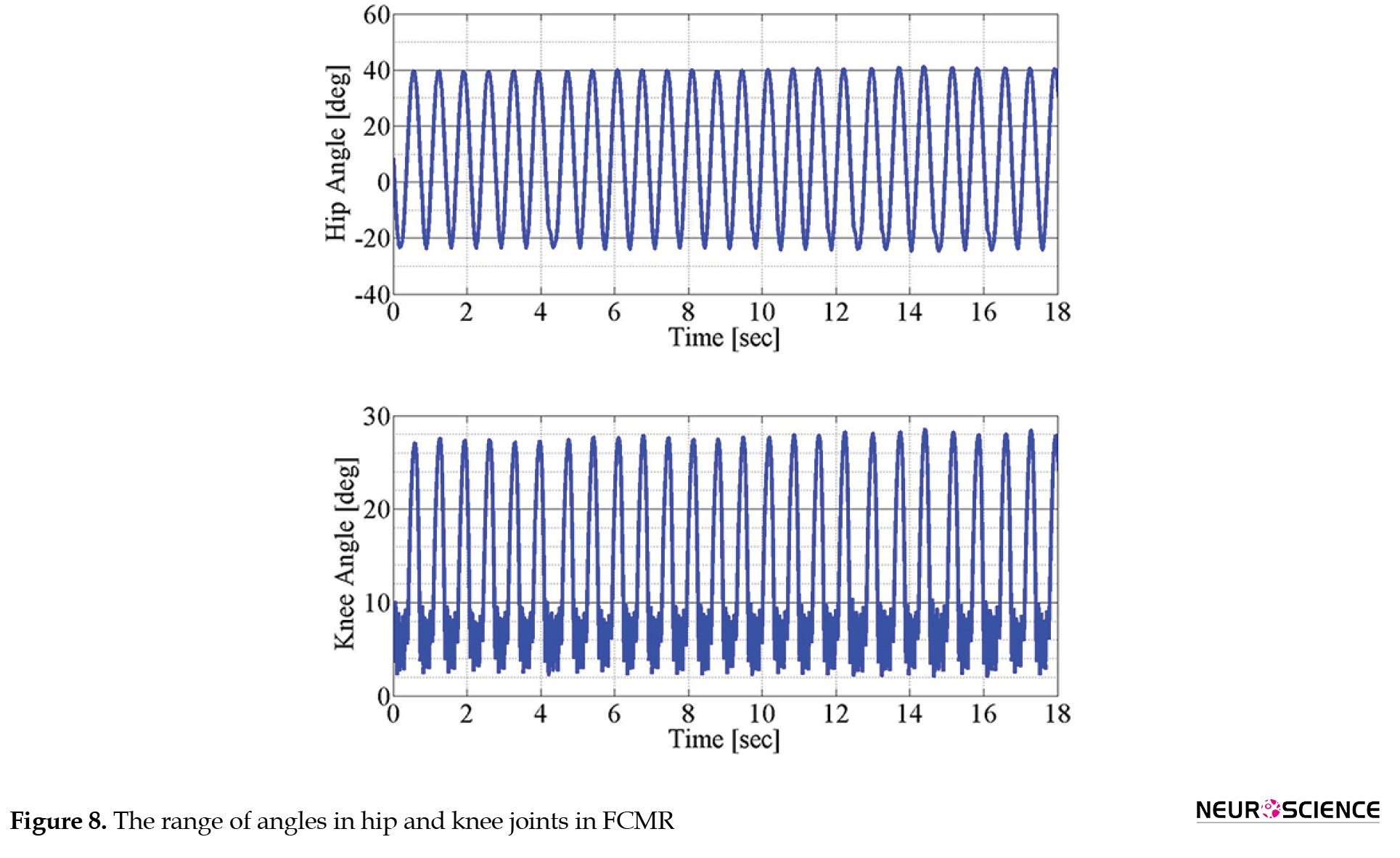
In the second step, we increase the number of fuzzy rules from 5 to 25 while keeping the number of fuzzy partitions and rate of overlapping unchanged. During this phase, the angles obtained in the hip and knee joints remain within the normal range (Figure 8).
Expanding the overlap of membership functions
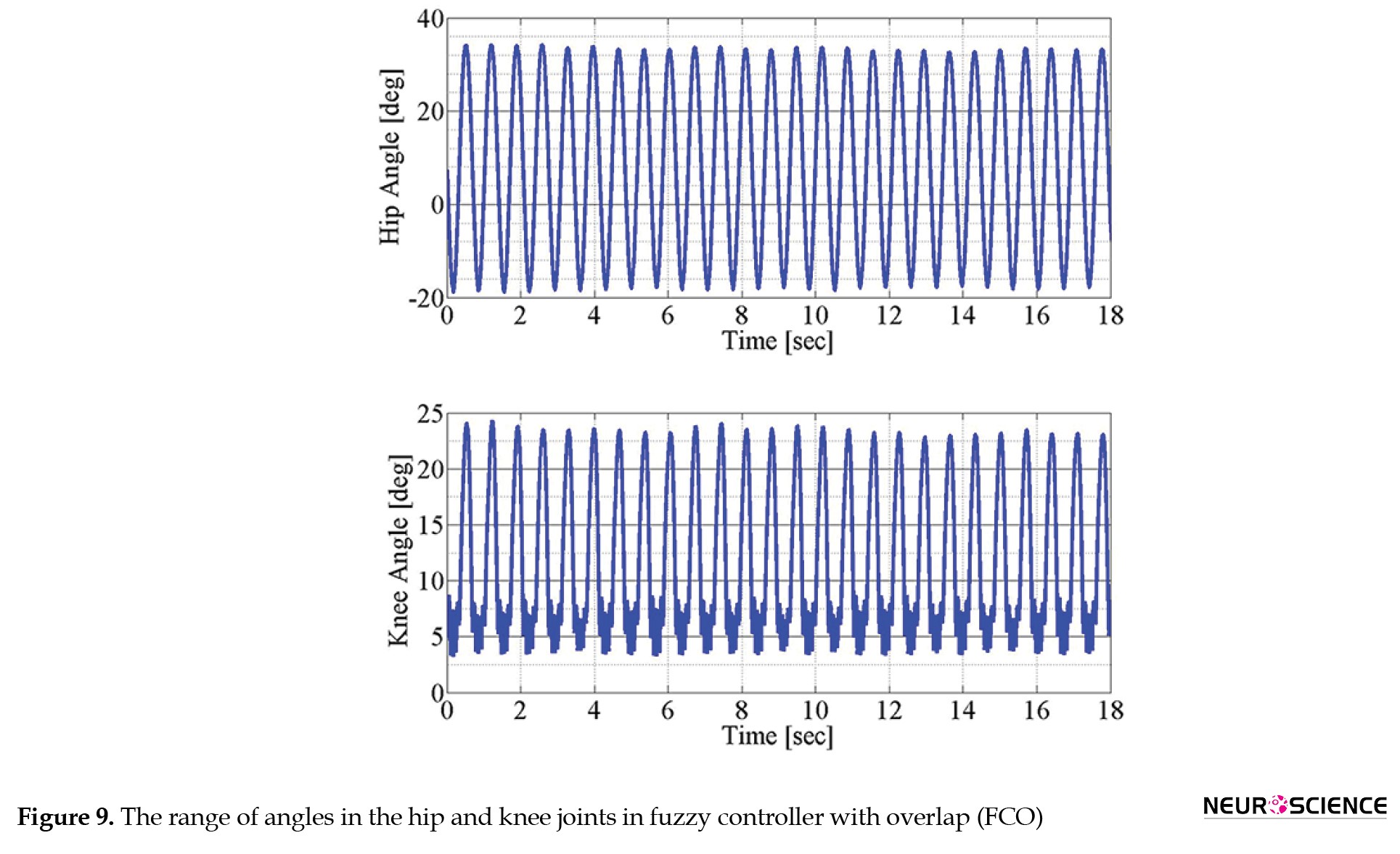
In the third step, we expand the overlap. The angles obtained in the hip and knee joints are in the normal range (Figure 9).
Increasing the number of fuzzy partitions
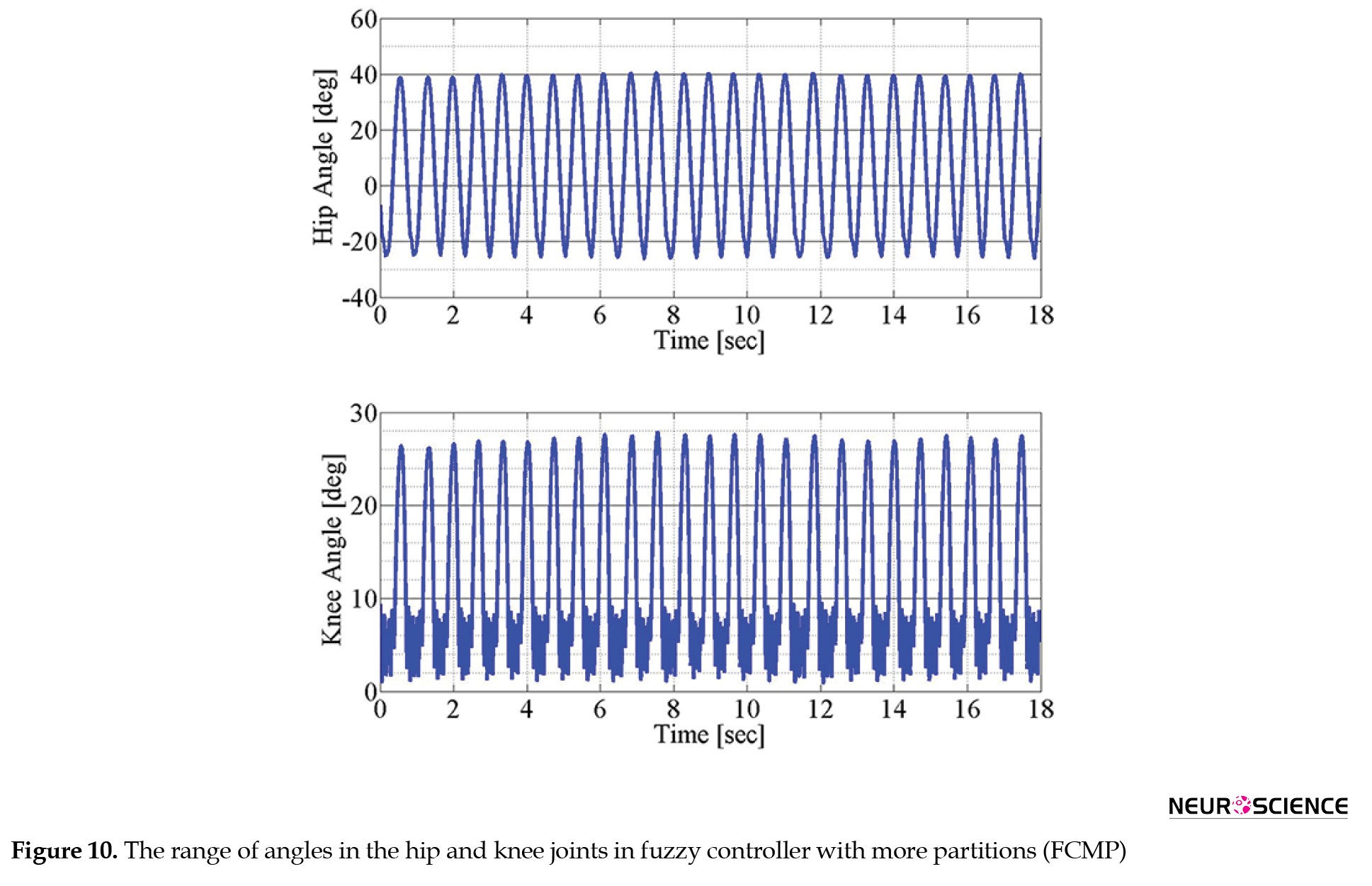
In the fourth step, while the number of fuzzy rules remains constant at 25, we increase the number of fuzzy membership functions. The obtained angles in the hip and knee joints fall within the normal range (Figure 10).
3. Results
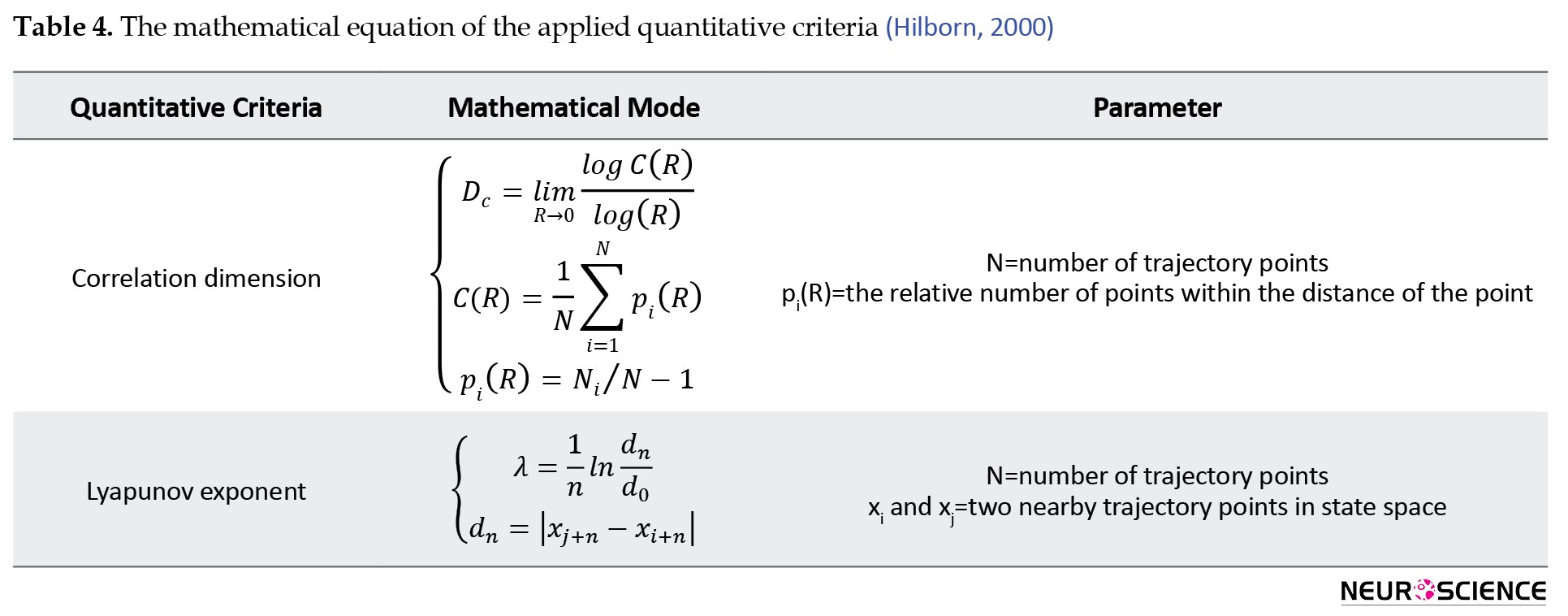
In this study, we evaluated the performance of the designed fuzzy controllers using a series of quantitative criteria. These criteria include the maximum amplitude of noise and step disturbances that the controller can handle while remaining stable. Additionally, we employed four quantitative criteria in the study by Rezaee and Kobravi (2020) for comparing and evaluating our controller performance, including the correlation dimension and Lyapunov exponent for the shank and thigh angles (Dc _shank, Dc _thigh, λ _shank, λ _thigh), as detailed in Table 4.
We introduced explicit disturbances, such as noise and step disturbances, directly into the model to assess the robustness of our fuzzy controller. This approach differs from the study conducted by Rezaee and Kobravi (2020), where the uncertainty is implied but not explicitly addressed, and no specific disturbance tests are performed. In contrast, our study focused on investigating uncertainty and assessing the performance of the fuzzy controller under uncertain conditions and disturbance tests. We simulated real-world conditions by applying disturbances with varying amplitudes and demonstrated that our simplified fuzzy controller, which uses only two inputs, manages these challenges.
The results of the simulation and analysis are given in Table 5.

Regarding the quantitative criteria related to the correlation dimension and Lyapunov exponent, in addition to the output value of the model, the absolute value of its difference from the normal level (Rezaee & Kobravi, 2020) was also included in the Table for a better comparison.
According to Table 5, the fuzzy controller with more partitions (FCMR) demonstrates increased accuracy and improved similarity to a healthy human gait compared to other fuzzy controllers. Also, the FCMR controller results in three of the four criteria (DC_thigh, λ_shank, λ_thigh) falling within the normal range, aligning more closely with healthy gait dynamics. Although in the study by Rezaee and Kobravi (2020), there was an effort to approximate healthy walking dynamics, only one criterion (DC_thigh) fell within the normal range. This outcome is attributed to the increased number of fuzzy rules and the absence of overlap in membership functions, as indicated by the correlation dimension and Lyapunov exponent values in the shank and thigh.
In contrast, fuzzy controller with more rules (FCO) exhibited an expanded overlap of membership functions, leading to increased noise and step disturbance tolerance compared to other fuzzy controllers. However, this outcome comes at the cost of reduced accuracy and a larger deviation from the walking dynamics of a healthy person, as indicated by the correlation dimension and Lyapunov exponent values.
Lastly, FCMP suffers from incomplete coverage of the decision space due to an increased number of fuzzy partitions and insufficient rules. Consequently, it exhibits reduced noise and step disturbance tolerance compared to other fuzzy controllers. However, the increased number of fuzzy partitions results in improved accuracy compared to FCO and closer dynamic with normal gait dynamics, as indicated by the values of Dc_shank, λ_shank, and λ_thigh.
4. Discussion
Advantages and conclusions of the proposed work
The primary objective of rehabilitation is to establish a movement pattern that closely resembles the dynamics of a healthy individual. Regrettably, some studies overlook this crucial aspect and focus solely on generating movement in the paralyzed limb without considering the potential harm it can inflict on the neuromuscular system. However, creating effective and goal-oriented rehabilitation, capable of generating and controlling a natural and healthy dynamic, runs into various challenges. On the one hand, the employed simplifications and linearization for modeling purposes, and on the other hand, the uncertainties inherent in the dynamics of biological systems, stemming from their chaotic nature, impede the attainment of a comprehensive understanding and accurate modeling of biological phenomena. Consequently, the only viable approach to tackle this challenge is embracing the true uncertainties in the surrounding world. Rather than disregarding reality and resorting to unnecessary simplifications, the intricate behavior of biological systems arising from their inherent uncertainty should be duly acknowledged when designing the desired control strategy. Effective knowledge management in this uncertain and imprecise world necessitates using appropriate tools. In this research, our primary focus was to develop a fuzzy controller based on the gait basin of attraction concept, leveraging the methodology outlined in the previous study (Rezaee & Kobravi, 2020). We strived to streamline the design of the controller, aiming to create a simplified structure that incorporates only two inputs. However, our main objective is to emphasize the significant role of proper management of uncertainty and imprecision knowledge in gait dynamics.
The fuzzy rules used in this study are developed through a comprehensive process that integrates simulation experiments and expert knowledge. This approach ensures the final rules are accurately tuned to meet system requirements and enhance controller performance. Our findings highlight the potential of fuzzy logic in managing the nonlinear dynamics of walking and enhancing gait performance, with implications for rehabilitation. The fuzzy logic-based controller offers a transparent structure and robust solution by effectively addressing uncertainties. This study underscores the importance of addressing these challenges and sheds light on the role of fuzzy logic in gait rehabilitation.
Although this study explicitly models and controls only two joints; using FES and ankle-foot orthoses is crucial in approximating healthy walking patterns. FES stimulates the knee and hip muscles, while the orthosis supports and stabilizes the ankle and foot, allowing the study to achieve gait patterns similar to those of a healthy subject. As shown in the results section, our investigation reveals that increasing the number of fuzzy rules and partitions enhances the output accuracy and gait dynamics' similarity to a healthy human. In contrast, incomplete coverage of the decision space due to an increased number of fuzzy partitions and insufficient rules reduces the controller's robustness. On the other hand, expanding the overlap of membership functions reduces the output accuracy but improves the robustness of the control strategy. This study demonstrates the effective management of uncertainties and imprecisions in system dynamics by adjusting the number of fuzzy rules, partitions, and membership function overlaps. Despite the simplicity of the designed controller structure with only two inputs, it outperforms the study of Rezaee and Kobravi (2020) due to its proper handling of the existing uncertainties and imprecisions in walking dynamics. In other words, these results indicate that a well-designed fuzzy controller, even with a simplified structure, can maintain stability and accuracy under challenging conditions. This improvement is due to the careful design of fuzzy rules, appropriate partitioning, and proper overlap of membership functions, which provide a more resilient control strategy.
Limitations of the proposed work
Whereas the study dataset was acquired from five volunteers during three uninterrupted gait cycles, more participants with different ages and genders and more gait cycles were needed to conclude the process accurately.
Future works
The employed control strategy can be used not only for people who are completely paralyzed but also for people who have muscle weakness. We hope to integrate the proposed strategy with an exoskeleton robot at the next step of this research. Also, we intend to consider the controller output as multi-variable in the future so that a separate control signal applies to each of the agonist and antagonist muscles of the knee and hip joints.
Ethical Considerations
Compliance with ethical guidelines
As this study used data from Rezaee and Kobravi's (2020) study, ethical approval was not required.
Funding
This research received no specific grant from funding agencies in the public, commercial or not-for-profit sectors.
Authors' contributions
Conceptualization, methodology, visualization, and visualization, All authors; Data curation, formal analysis, software, writing the original draft, Zohre Rezaee; Supervision, review and editing: Mohammad-R Akbarzadeh-T.
Conflict of interest
The authors declared no conflict of interest.
Acknowledgments
The authors have to express their sincere thanks to Hamidreza Kobravi for generously providing us with his database.
References
Andrews, B. J., Baxendale, R. H., Barnett, R., Phillips, G. F., Yamazaki, T., & Paul, J. P., et al. (1988). Hybrid FES orthosis incorporating closed loop control and sensory feedback. Journal of Biomedical Engineering, 10(2), 189–195. [DOI:10.1016/0141-5425(88)90099-4] [PMID]
Brunetti, F., Garay, A., Moreno, J.C., Pons, J.L. (2011). Enhancing functional electrical stimulation for emerging rehabilitation robotics in the framework of HYPER project. Paper presented at: 2011 IEEE International Conference on Rehabilitation Robotics: Zurich: Switzerland: 29 June 2011. [DOI:10.1109/ICORR.2011.5975370]
Chen, M., Wu, B., Lou, X., Zhao, T., Li, J., & Xu, Z., et al. (2013). A self-adaptive foot-drop corrector using functional electrical stimulation (FES) modulated by tibialis anterior electromyography (EMG) dataset. Medical Engineering & Physics, 35(2), 195–204. [DOI:10.1016/j.medengphy.2012.04.016] [PMID]
Ding, Y., Kastin, A. J., & Pan, W. (2005). Neural plasticity after spinal cord injury. Current Pharmaceutical Design, 11(11): 1441–1450. [DOI:10.2174/1381612053507855] [PMID]
Díaz, I., Gil, J.J., Sánchez, E. (2011). Lower-limb robotic rehabilitation, Literature review and challenges. Journal of Robotics, 2011, 1-11. [DOI:10.1155/2011/759764]
del-Ama, A. J., Gil-Agudo, A., Pons, J. L., & Moreno, J. C. (2014). Hybrid FES-robot cooperative control of ambulatory gait rehabilitation exoskeleton. Journal of Neuroengineering and Rehabilitation, 11: 27. [DOI:10.1186/1743-0003-11-27] [PMID]
Dosen, S., & Popović, D. B. (2009). Moving-window dynamic optimization, Design of stimulation profiles for walking. IEEE Transactions on Bio-Medical Engineering, 56(5), 1298–1309.[DOI:10.1109/TBME.2009.2013935] [PMID]
deGuzman, G. C., & Kelso, J. A. (1991). Multifrequency behavioral patterns and the phase attractive circle map. Biological Cybernetics, 64(6), 485–495. [DOI:10.1007/BF00202613] [PMID]
Foroutannia, A., Akbarzadeh-T, M. R., & Akbarzadeh, A. (2022). A deep learning strategy for EMG-based joint position prediction in hip exoskeleton assistive robots. Biomedical Signal Processing and Control, 75, 103557. [DOI:10.1016/j.bspc.2022.103557]
Fu, C., Suzuki, Y., Kiyono, K., Morasso, P., & Nomura, T. (2014). An intermittent control model of flexible human gait using a stable manifold of saddle-type unstable limit cycle dynamics. Journal of the Royal Society, Interface, 11(101): 20140958. [DOI:10.1098/rsif.2014.0958] [PMID]
Hilborn, R. C. (2000). Chaos and nonlinear system, An introduction for scientists and engineers (2nd ed.). Oxford: Oxford University Press. [DOI:10.1093/acprof:oso/9780198507239.001.0001]
Johansson B. B. (2007). Regeneration and plasticity in the brain and spinal cord. Journal of Cerebral Blood Flow and Metabolism, 27(8), 1417–1430. [DOI:10.1038/sj.jcbfm.9600486] [PMID]
Jensen, M. H., Bak, P., & Bohr, T. (1984). Transition to chaos by interaction of resonances in dissipative systems. I. Circle maps. Physical review A, 30(4), 1960. [DOI:10.1103/PhysRevA.30.1960]
Kimura, R., Matsunaga, T., Iwami, T., Kudo, D., Saitoh, K., & Hatakeyama, K., et al. (2018). Development of a rehabilitation robot combined with functional electrical stimulation controlled by non-disabled lower extremity in hemiplegic gait. Progress in Rehabilitation Medicine, 3, 20180005. [DOI:10.2490/prm.20180005] [PMID]
Lyons, G.M., Wilcox, D.J., Lyons, D.J., Hilton, D. (2000). Evaluation of a drop foot stimulator FES intensity envelope matched to tibialis anterior muscle activity during walking. Proceedings of the 5th Annual Conference of the International Functional Electrical Stimulation Society. Aalborg: Denmark, 20 June 2000. [Link]
Marchal-Crespo, L., & Reinkensmeyer, D. J. (2009). Review of control strategies for robotic movement training after neurologic injury. Journal of Neuroengineering and Rehabilitation, 6, 20. [DOI:10.1186/1743-0003-6-20] [PMID]
Meng, W., Liu, Q., Zhou, Z., Ai, Q., Sheng, B., & Xie, S. S. (2015). Recent development of mechanisms and control strategies for robot-assisted lower limb rehabilitation. Mechatronics, 31, 132-145. [DOI:10.1016/j.mechatronics.2015.04.005]
Nekoukar, V., Erfanian, A. (2011). An adaptive fuzzy sliding mode controller design for walking control with functional electrical stimulation: A computer simulation study. International Journal of Control, Automation and Systems, 9(6), 1124-35. [DOI:10.1007/s12555-011-0614-4]
Nekoukar, V., & Erfanian, A. (2012). A decentralized modular control framework for robust control of FES-activated walker-assisted paraplegic walking using terminal sliding mode and fuzzy logic control. IEEE Transactions on Bio-Medical Engineering, 59(10), 2818–2827. [DOI:10.1109/TBME.2012.2208963] [PMID]
O'Keeffe, D. T., Donnelly, A. E., & Lyons, G. M. (2003). The development of a potential optimized stimulation intensity envelope for drop foot applications. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 11(3), 249–256. [DOI:10.1109/TNSRE.2003.817678] [PMID]
Popović, D., Stein, R. B., Oğuztöreli, N., Lebiedowska, M., & Jonić, S. (1999). Optimal control of walking with functional electrical stimulation: A computer simulation study. IEEE Transactions on Rehabilitation Engineering, 7(1), 69–79. [DOI:10.1109/86.750554] [PMID]
Rezaee, Z., & Kobravi, H. R. (2020). Human gait control using functional electrical stimulation based on controlling the shank dynamics. Basic and Clinical Neuroscience, 11(1), 1–14. [DOI:10.32598/bcn.11.1.173.2] [PMID]
Shi, D., Zhang, W., Zhang, W., Ding, X. (2019). A review on lower limb rehabilitation exoskeleton robots. Chinese Journal of Mechanical Engineering, 32(1), 1-11. [DOI:10.1186/s10033-019-0389-8]
Viteckova, S., Kutilek, P., & Jirina, M. (2013). Wearable lower limb robotics: A review. Biocybernetics and Biomedical Engineering, 33(2), 96-105. [DOI:10.1016/j.bbe.2013.03.005]
Zhou, J., Yang, S., Xue, Q. (2021). Lower limb rehabilitation exoskeleton robot: A review. Advances in Mechanical Engineering, 13(4). [DOI:10.1177/16878140211011862]
Full-Text:
1. Introduction
The modern dormant lifestyle, injuries, and strokes have increased incidents of walking disorders. However, the brain can reorganize itself and make adaptive changes, known as neural plasticity (Ding et al., 2005; Johansson, 2007). Hence, there is a possibility for walking healthily again with an effective rehabilitative and muscle-strengthening program. To this end, functional electrical stimulation (FES) is often considered a viable neurorehabilitation technology. However, devising an effective FES-based control strategy could be very complex and uncertain due to human gait rehabilitation's unknown and time-varying dynamics. Robotic devices used concurrently with FES are also suggested to assist with diverse sensory and motor functions (Díaz et al., 2011; Shi et al., 2019; Zhou et al., 2021; Viteckova et al., 2013). For instance, Andrews et al. (1988) used a hybrid FES orthosis for patients with spinal cord damage paraplegic in cases where the quadriceps muscles were electrically excitable. Nevertheless, the common concern in such rehabilitation programs remains to find a suited control strategy (Marchal-Crespo & Reinkensmeyer, 2009; Meng et al., 2015; Foroutannia et al., 2022), with the added complexity of choosing the proper combination of electrical stimulation and robotic devices (Brunetti et al., 2011; Del-Ama et al., 2014; Kimura et al., 2018).
So far, diverse control methods have been designed to restore movement and gait correction in patients with movement disorders. These studies suggest that using the traditional trapezoidal stimulation intensity approach is inappropriate due to its incompatibility with the muscle activity patterns in healthy walking. In contrast, a stimulation strategy based on the natural muscle activation patterns could improve walking in disorders such as foot drop. FES performance could also improve while reducing muscle fatigue and energy consumption (Lyons et al., 2000; O'Keeffe et al., 2003). Furthermore, to correct foot drop, we can use an algorithm to predict step frequency for applying excitation close to natural walking by simulating natural patterns from the EMG dataset of the anterior tibialis muscle (Chen et al., 2013). A sliding-mode controller, in which an adaptive fuzzy controller compensates for approximation errors, is suggested for paraplegic patients. In this case, the control strategy guarantees accurate tracking, leading to muscle excitation patterns similar to normal gait and fast convergence (Nekoukar & Erfanian, 2011). Furthermore, a decoupled controller structure, i.e. separately for each joint-muscle dynamics, is suggested by Nekoukar and Erfanian (2012) that consists of an adaptive fuzzy terminal sliding mode controller to adjust the pulse width of the stimulation signal and a fuzzy controller to adjust the pulse amplitude of the excitation signal.
Partial and decoupled handling of joints and using predetermined trajectories are not the appropriate framework for a biological system's real-world uncertainties and complex dynamics. Instead, a suitable control strategy should carry a holistic view by operating around a stable walking phase space manifold (Fu et al., 2014). This objective, however, is non-trivial due to biological systems' time-varying and complex and uncertain dynamical behavior. In other words, an ill-defined problem is posed here since the exact equations of the system and its saddle cycle in the gait phase space and its manifolds are unknown.
It is important to note that the objective of rehabilitation extends beyond merely generating movement in a disabled limb. Sometimes, purely mimicking movement without considering the dynamics of the system and the inherent synergy between muscles and joints can be detrimental. Moreover, human knowledge regarding various aspects of the surrounding world is limited, leading to simplification and modeling of phenomena like walking. However, this simplification and modeling process can increase uncertainty, potentially diverting us from the ultimate goal. Now, the significance of employing the correct approach to address uncertainties in the dynamics of biological systems becomes apparent, particularly in goal-oriented rehabilitation. By understanding and effectively dealing with these uncertainties, we can direct our efforts toward the creation of rehabilitation methods that are purposeful and aimed at achieving the desired outcomes.
This study aims to exploit this (tolerance for) uncertainty and imprecision to enhance the quality of gait rehabilitation. Specifically, we employ a fuzzy controller using a gait basin of attraction (Rezaee & Kobravi, 2020) and study how its uncertainty representation influences gait performance. The controller's inputs are the commonly measurable shank angle and shank angular velocity's deviation from a detected sine-circular map, and its output is the excitation signal.
The remainder of this report is organized as follows. The materials and methods include the human walking model, the data acquisition process, the control strategy, and simulations and analysis. Finally, the overall results and conclusions are presented in the results and discussion.
2. Materials and Methods
Human walking model
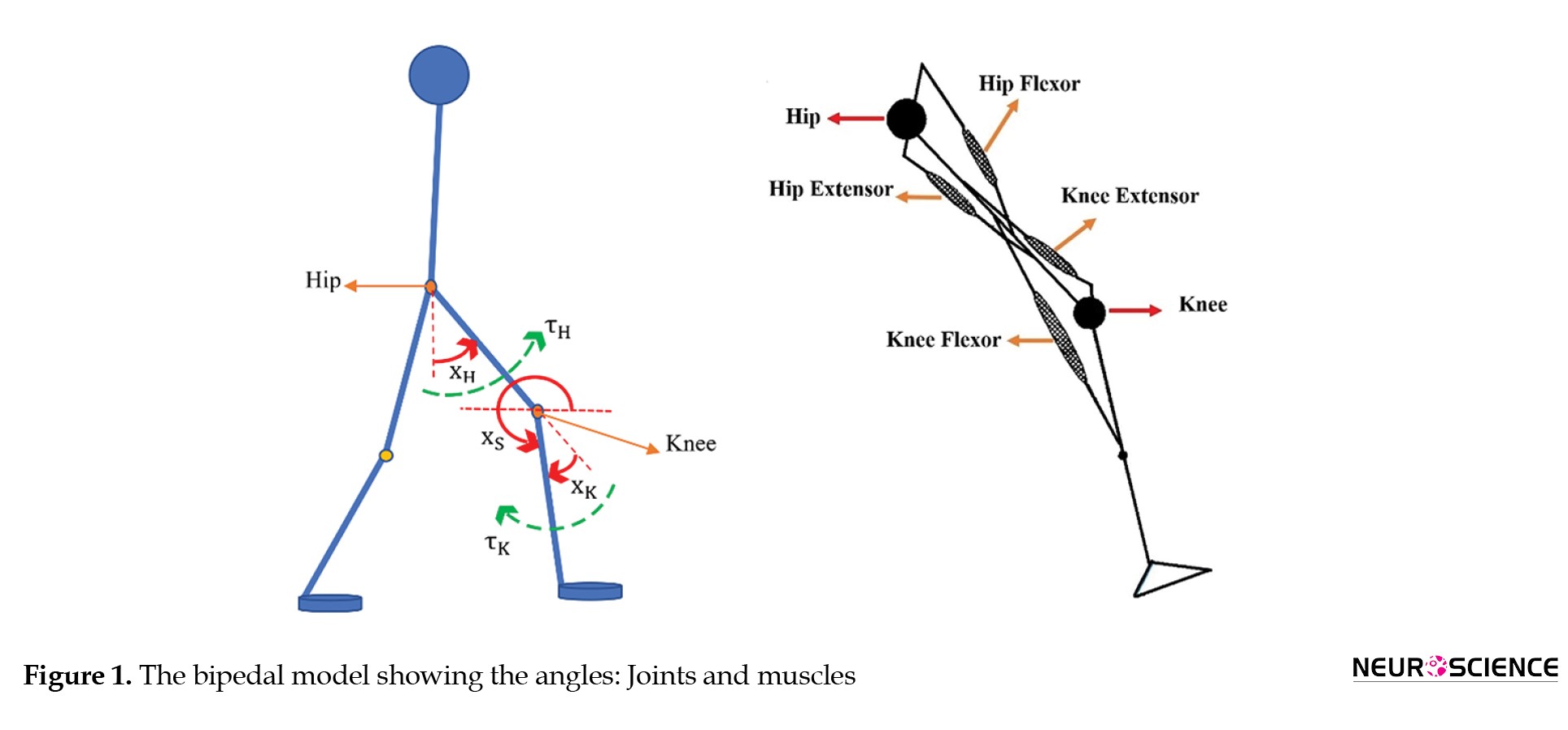
A bipedal musculoskeletal model was used for this study (Figure 1).
The modern dormant lifestyle, injuries, and strokes have increased incidents of walking disorders. However, the brain can reorganize itself and make adaptive changes, known as neural plasticity (Ding et al., 2005; Johansson, 2007). Hence, there is a possibility for walking healthily again with an effective rehabilitative and muscle-strengthening program. To this end, functional electrical stimulation (FES) is often considered a viable neurorehabilitation technology. However, devising an effective FES-based control strategy could be very complex and uncertain due to human gait rehabilitation's unknown and time-varying dynamics. Robotic devices used concurrently with FES are also suggested to assist with diverse sensory and motor functions (Díaz et al., 2011; Shi et al., 2019; Zhou et al., 2021; Viteckova et al., 2013). For instance, Andrews et al. (1988) used a hybrid FES orthosis for patients with spinal cord damage paraplegic in cases where the quadriceps muscles were electrically excitable. Nevertheless, the common concern in such rehabilitation programs remains to find a suited control strategy (Marchal-Crespo & Reinkensmeyer, 2009; Meng et al., 2015; Foroutannia et al., 2022), with the added complexity of choosing the proper combination of electrical stimulation and robotic devices (Brunetti et al., 2011; Del-Ama et al., 2014; Kimura et al., 2018).
So far, diverse control methods have been designed to restore movement and gait correction in patients with movement disorders. These studies suggest that using the traditional trapezoidal stimulation intensity approach is inappropriate due to its incompatibility with the muscle activity patterns in healthy walking. In contrast, a stimulation strategy based on the natural muscle activation patterns could improve walking in disorders such as foot drop. FES performance could also improve while reducing muscle fatigue and energy consumption (Lyons et al., 2000; O'Keeffe et al., 2003). Furthermore, to correct foot drop, we can use an algorithm to predict step frequency for applying excitation close to natural walking by simulating natural patterns from the EMG dataset of the anterior tibialis muscle (Chen et al., 2013). A sliding-mode controller, in which an adaptive fuzzy controller compensates for approximation errors, is suggested for paraplegic patients. In this case, the control strategy guarantees accurate tracking, leading to muscle excitation patterns similar to normal gait and fast convergence (Nekoukar & Erfanian, 2011). Furthermore, a decoupled controller structure, i.e. separately for each joint-muscle dynamics, is suggested by Nekoukar and Erfanian (2012) that consists of an adaptive fuzzy terminal sliding mode controller to adjust the pulse width of the stimulation signal and a fuzzy controller to adjust the pulse amplitude of the excitation signal.
Partial and decoupled handling of joints and using predetermined trajectories are not the appropriate framework for a biological system's real-world uncertainties and complex dynamics. Instead, a suitable control strategy should carry a holistic view by operating around a stable walking phase space manifold (Fu et al., 2014). This objective, however, is non-trivial due to biological systems' time-varying and complex and uncertain dynamical behavior. In other words, an ill-defined problem is posed here since the exact equations of the system and its saddle cycle in the gait phase space and its manifolds are unknown.
It is important to note that the objective of rehabilitation extends beyond merely generating movement in a disabled limb. Sometimes, purely mimicking movement without considering the dynamics of the system and the inherent synergy between muscles and joints can be detrimental. Moreover, human knowledge regarding various aspects of the surrounding world is limited, leading to simplification and modeling of phenomena like walking. However, this simplification and modeling process can increase uncertainty, potentially diverting us from the ultimate goal. Now, the significance of employing the correct approach to address uncertainties in the dynamics of biological systems becomes apparent, particularly in goal-oriented rehabilitation. By understanding and effectively dealing with these uncertainties, we can direct our efforts toward the creation of rehabilitation methods that are purposeful and aimed at achieving the desired outcomes.
This study aims to exploit this (tolerance for) uncertainty and imprecision to enhance the quality of gait rehabilitation. Specifically, we employ a fuzzy controller using a gait basin of attraction (Rezaee & Kobravi, 2020) and study how its uncertainty representation influences gait performance. The controller's inputs are the commonly measurable shank angle and shank angular velocity's deviation from a detected sine-circular map, and its output is the excitation signal.
The remainder of this report is organized as follows. The materials and methods include the human walking model, the data acquisition process, the control strategy, and simulations and analysis. Finally, the overall results and conclusions are presented in the results and discussion.
2. Materials and Methods
Human walking model
A bipedal musculoskeletal model was used for this study (Figure 1).
In the musculoskeletal model used for simulation, the ankle and phalangeal joints are not explicitly considered, assuming the subject uses an ankle-foot orthosis while walking. By stabilizing the lower limb and correcting alignment, the orthosis allows the focus to remain on the dynamics of the knee and hip joints, thereby approximating a gait pattern that resembles normal walking. The integration of FES and orthosis effectively compensates for the simplified joint model. The orthosis stabilizes the lower limb and supports a natural walking pattern, while FES ensures that the knee and hip muscles are appropriately engaged. This combination enables the study to approximate healthy gait patterns despite modeling only two joints.
Equation 1 describes the model dynamics,

, where X(t)=[xK xH]T represents the angles vector (i.e. xK and xH are the knee and hip joint angles, respectively). Also, X ̇(t)=[x ̇K x ̇H]T indicates the angular velocity of the knee and hip joints. M is the inertia matrix, C is the Coriolis torque matrix, G is the gravity force vector, τfd is a vector of ground reaction torque, and V(t) is the white noise, which expresses the uncertainty process.
Τ(t)=[τS τT]T is the torque vector produced in the shank and thigh determined as follows:
, where the parameters Tif, Tie, and Tir are flexor, extensor, and resistance torques, respectively, described as:
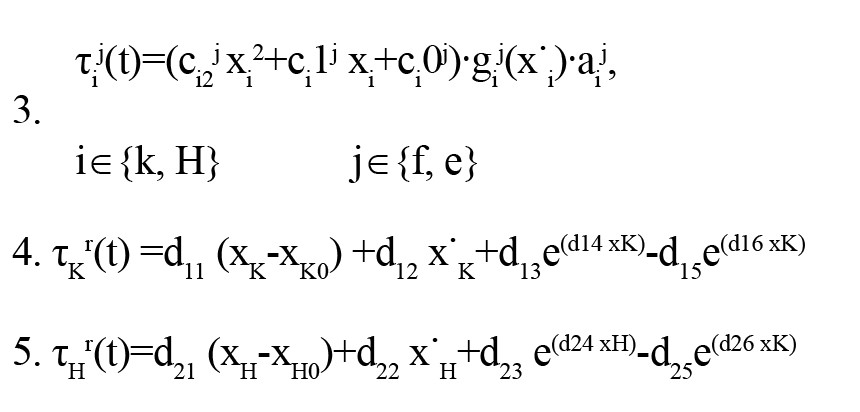
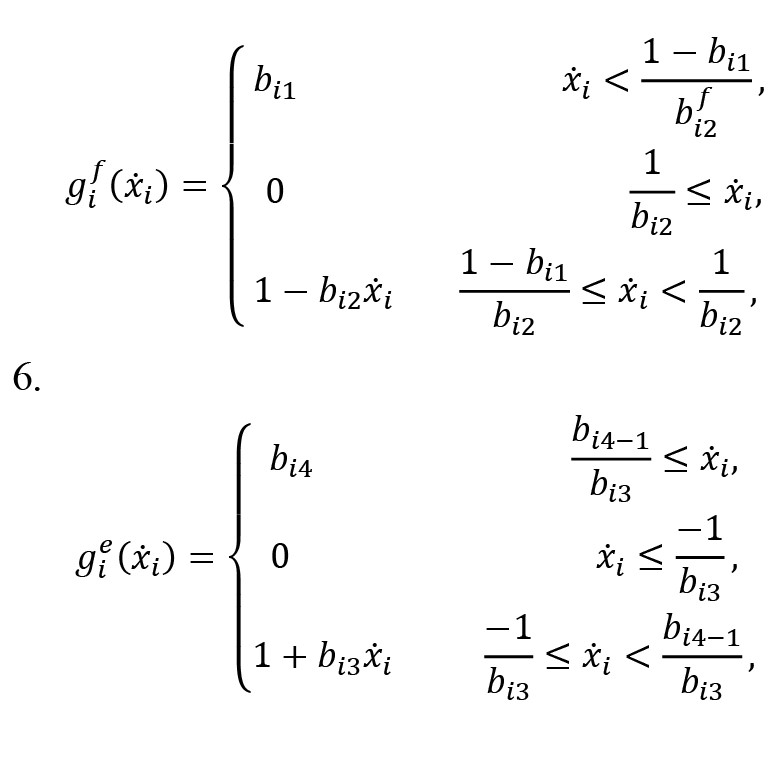
The variables gij are determined as:
The variables aij in Equation 3 indicate the activity of flexor and extensor muscles that are determined as below:

, where the variables ui are the normalized output signals of the controller, which are applied to the four muscles involved in gait in this model (i.e. flexor and extensor muscles of the hip and knee joints). The values of the parameters τact and τdeact, which are time constants of activation and deactivation, respectively, 20 and 60 ms are adjusted.
Further details and adjustments of the values of the parameters are described in some studies (Nekoukar & Erfanian, 2011; Dosen & Popovic, 1999; Kimura et al., 2009).
Data acquisition
In this study, we used the data from Rezaee and Kobravi (2020) study. The present analysis uses shank angle data of 5 healthy volunteers during three uninterrupted gait cycles. Specifications of volunteers are given in Table 1.
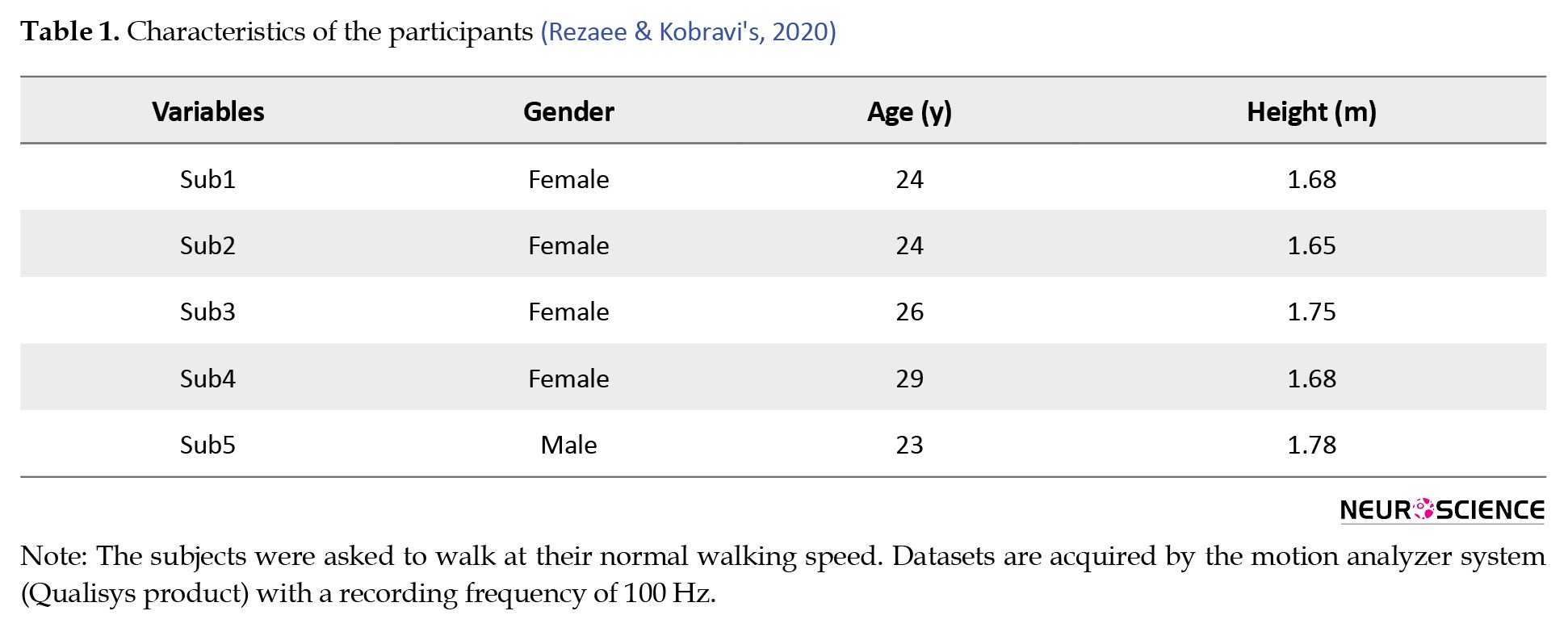
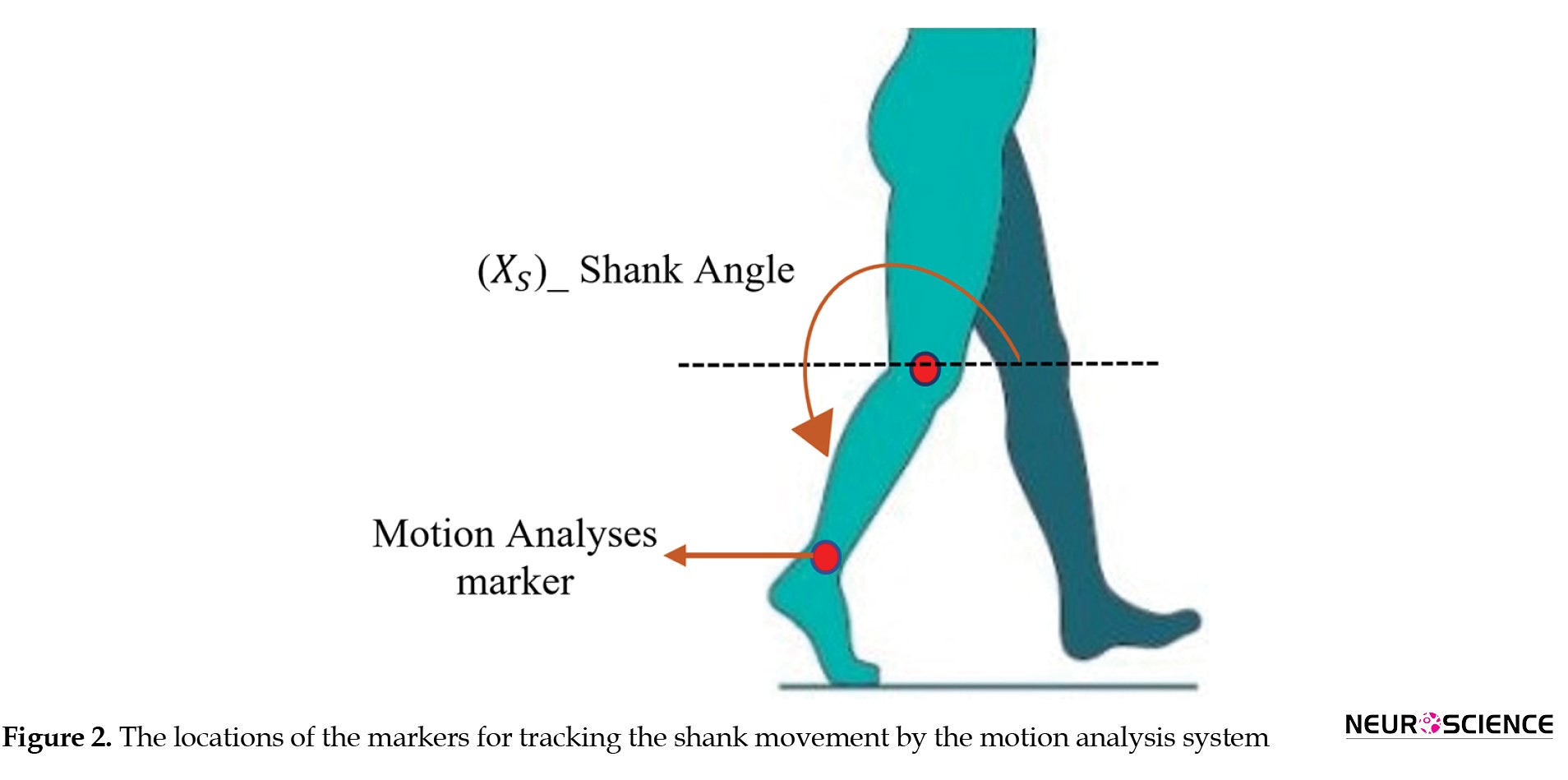
Also, Figure 2 shows the markers' position for tracking the shank movement during gait and data acquisition.
Equation 1 describes the model dynamics,
, where X(t)=[xK xH]T represents the angles vector (i.e. xK and xH are the knee and hip joint angles, respectively). Also, X ̇(t)=[x ̇K x ̇H]T indicates the angular velocity of the knee and hip joints. M is the inertia matrix, C is the Coriolis torque matrix, G is the gravity force vector, τfd is a vector of ground reaction torque, and V(t) is the white noise, which expresses the uncertainty process.
Τ(t)=[τS τT]T is the torque vector produced in the shank and thigh determined as follows:
, where the parameters Tif, Tie, and Tir are flexor, extensor, and resistance torques, respectively, described as:
The variables gij are determined as:
The variables aij in Equation 3 indicate the activity of flexor and extensor muscles that are determined as below:
, where the variables ui are the normalized output signals of the controller, which are applied to the four muscles involved in gait in this model (i.e. flexor and extensor muscles of the hip and knee joints). The values of the parameters τact and τdeact, which are time constants of activation and deactivation, respectively, 20 and 60 ms are adjusted.
Further details and adjustments of the values of the parameters are described in some studies (Nekoukar & Erfanian, 2011; Dosen & Popovic, 1999; Kimura et al., 2009).
Data acquisition
In this study, we used the data from Rezaee and Kobravi (2020) study. The present analysis uses shank angle data of 5 healthy volunteers during three uninterrupted gait cycles. Specifications of volunteers are given in Table 1.
Also, Figure 2 shows the markers' position for tracking the shank movement during gait and data acquisition.
Control strategy
In this study, four main steps are taken to design the controller. The first step is to plot and reconstruct the phase space of the system based on drawing the shank angle, the shank angular velocity, and the shank angular acceleration relative to each other (Figure 3).
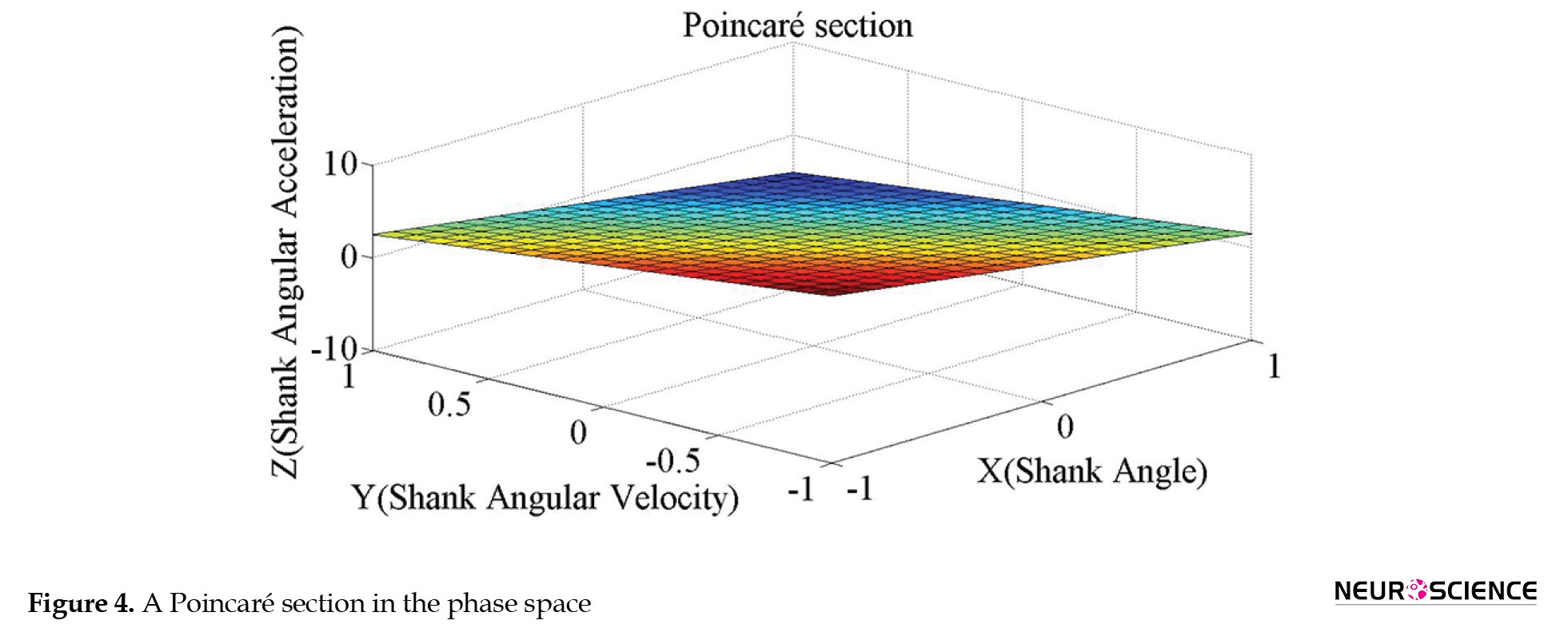
The second step is to apply the Poincaré section in the gait phase space to collect points that contain essential information about gait dynamics (Figure 4).
In this research, the method of computing the normal vector is used to get the Poincaré section equation (Rezaee & Kobravi, 2020).
The third step is to select a proper map describing the relative variations of the collected points by the Poincaré section. The walking process has a cyclical behavior, and its basin of attraction can have periodic, quasi-periodic, or chaotic characteristics.
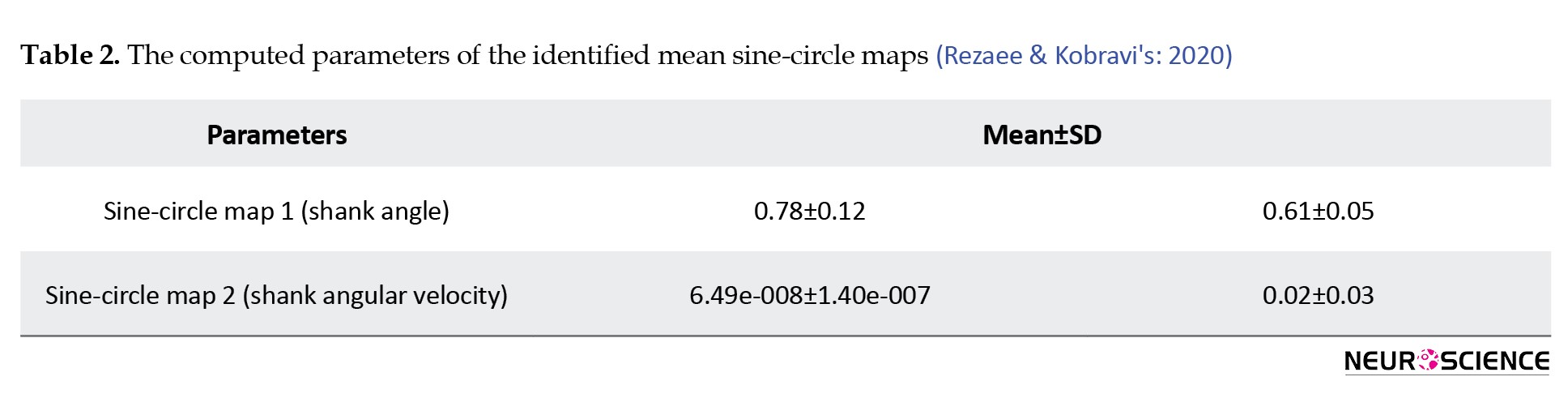
Hence, we used the sine-circle map because it can describe these features. Equation 8 defines the sine-circle map where θ is the desired parameter, Ω represents the frequency rate, and K determines the degree of nonlinearity (Jensen et al., 1960; DeGuzman & Kelso, 1991; Hilborn, 2000). Ω and K are estimated using the least square error method (Rezaee & Kobravi, 2020).

To simplify the structure of the controller, only two maps identified in the study (Rezaee & Kobravi, 2020), which are related to the shank angle and angular velocity, have been used.
Equation 9 shows two identified maps where XS is the shank angle, and X ̇S is the shank angular velocity.
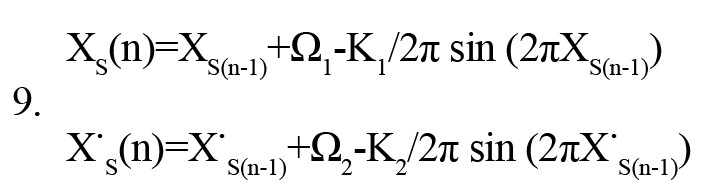
Table 2 shows the values of the computed parameters of the recognized mean maps.
Further details on these three steps are described in Rezaee and Kobravi's (2020) study.
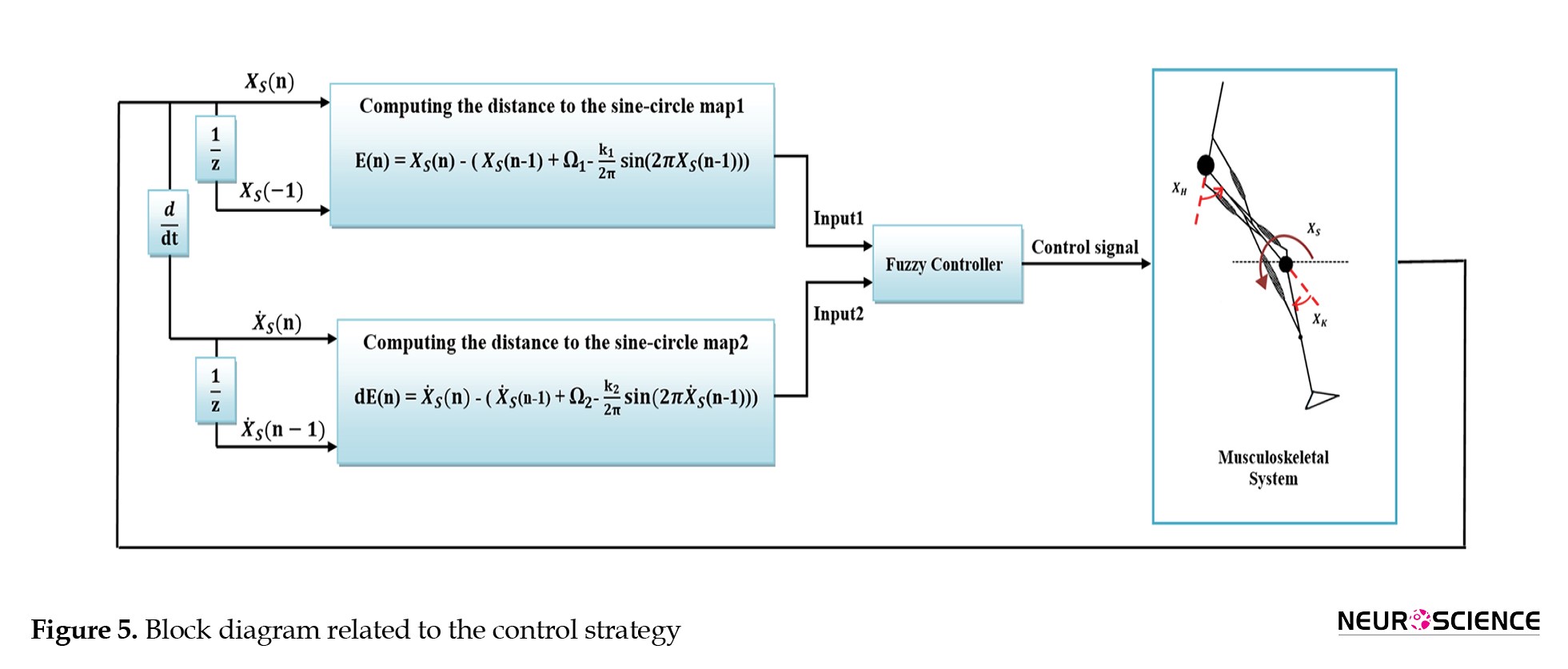
The fourth step is designing a fuzzy controller that consists of two inputs. For this purpose, we apply the Mamdani fuzzy inference system and centroid of area method for defuzzification.
The inputs of this fuzzy controller include the values of the system trajectory distance from the detected sine-circle maps related to the shank angle and the shank angular velocity, respectively. Its output regulates the excitation signal applied to the four muscles involved in walking. Figure 5 shows the block diagram of the applied control strategy.
The third step is to select a proper map describing the relative variations of the collected points by the Poincaré section. The walking process has a cyclical behavior, and its basin of attraction can have periodic, quasi-periodic, or chaotic characteristics.
Hence, we used the sine-circle map because it can describe these features. Equation 8 defines the sine-circle map where θ is the desired parameter, Ω represents the frequency rate, and K determines the degree of nonlinearity (Jensen et al., 1960; DeGuzman & Kelso, 1991; Hilborn, 2000). Ω and K are estimated using the least square error method (Rezaee & Kobravi, 2020).
To simplify the structure of the controller, only two maps identified in the study (Rezaee & Kobravi, 2020), which are related to the shank angle and angular velocity, have been used.
Equation 9 shows two identified maps where XS is the shank angle, and X ̇S is the shank angular velocity.
Table 2 shows the values of the computed parameters of the recognized mean maps.
Further details on these three steps are described in Rezaee and Kobravi's (2020) study.
The fourth step is designing a fuzzy controller that consists of two inputs. For this purpose, we apply the Mamdani fuzzy inference system and centroid of area method for defuzzification.
The inputs of this fuzzy controller include the values of the system trajectory distance from the detected sine-circle maps related to the shank angle and the shank angular velocity, respectively. Its output regulates the excitation signal applied to the four muscles involved in walking. Figure 5 shows the block diagram of the applied control strategy.
Simulation and analysis
In this section, we examine the effects of handling existing uncertainties and imprecisions in the gait dynamics on the control quality by increasing the number of fuzzy rules, expanding the overlap of membership functions, and increasing the number of fuzzy partitions. The research process is shown in Figure 6.
The initial design of the fuzzy controller
In the first step, we designed a fuzzy controller with five membership functions in each input and output, without overlap, and five fuzzy rules. As seen in Figure 7, the angles obtained in the hip and knee joints are abnormal due to the crisp behavior of the controller, and the model output has distortion.
Increasing the number of fuzzy rules
In the second step, we increase the number of fuzzy rules from 5 to 25 while keeping the number of fuzzy partitions and rate of overlapping unchanged. During this phase, the angles obtained in the hip and knee joints remain within the normal range (Figure 8).
Expanding the overlap of membership functions
In the third step, we expand the overlap. The angles obtained in the hip and knee joints are in the normal range (Figure 9).
Increasing the number of fuzzy partitions
In the fourth step, while the number of fuzzy rules remains constant at 25, we increase the number of fuzzy membership functions. The obtained angles in the hip and knee joints fall within the normal range (Figure 10).
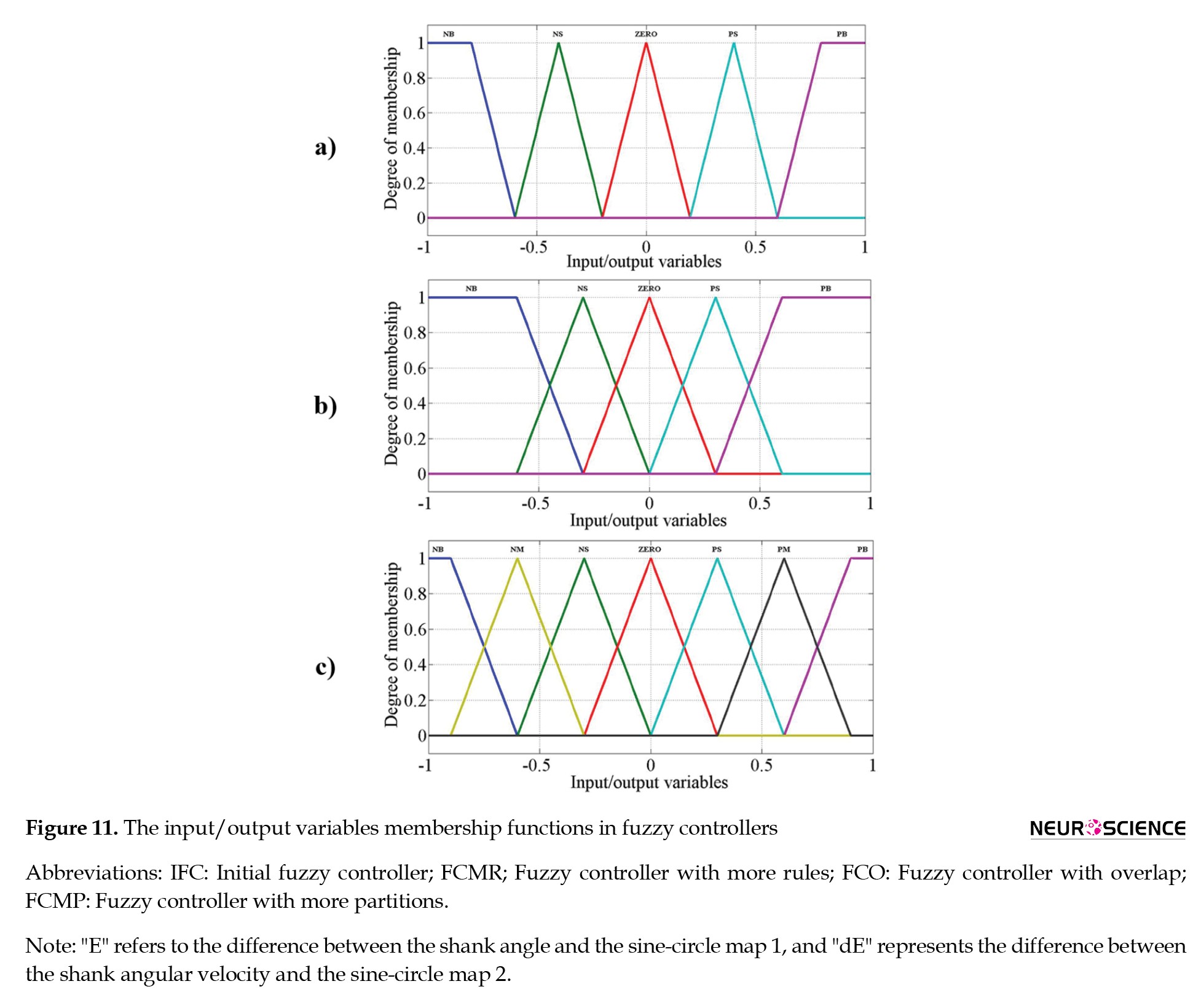
The fuzzy rules database is provided in Table 3, and Figure 11 depicts the membership functions of input/output variables related to the mentioned fuzzy controllers.
.jpg)
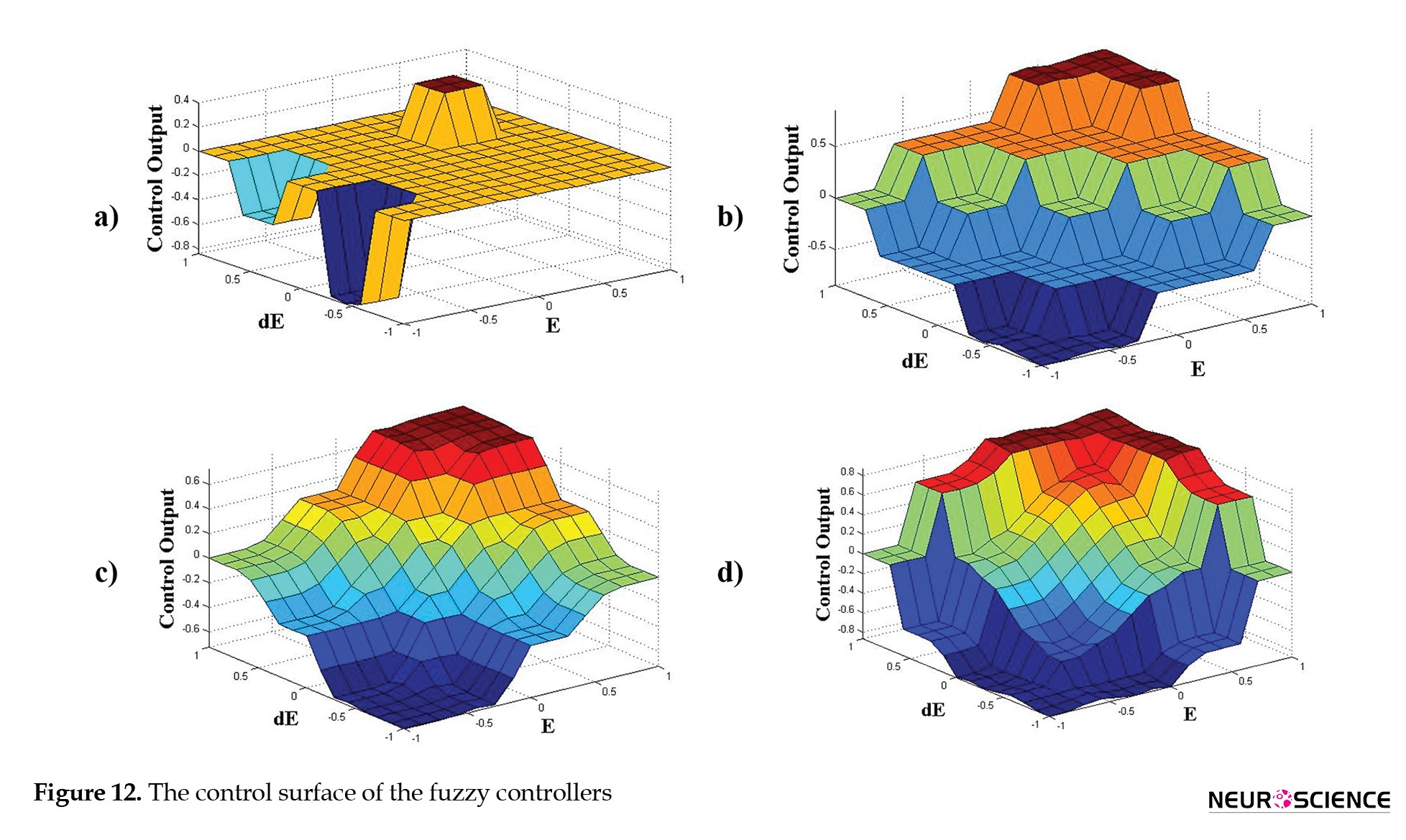
Also, Figure 12 shows the control surface of the mentioned fuzzy controllers.
3. Results
In this study, we evaluated the performance of the designed fuzzy controllers using a series of quantitative criteria. These criteria include the maximum amplitude of noise and step disturbances that the controller can handle while remaining stable. Additionally, we employed four quantitative criteria in the study by Rezaee and Kobravi (2020) for comparing and evaluating our controller performance, including the correlation dimension and Lyapunov exponent for the shank and thigh angles (Dc _shank, Dc _thigh, λ _shank, λ _thigh), as detailed in Table 4.
We introduced explicit disturbances, such as noise and step disturbances, directly into the model to assess the robustness of our fuzzy controller. This approach differs from the study conducted by Rezaee and Kobravi (2020), where the uncertainty is implied but not explicitly addressed, and no specific disturbance tests are performed. In contrast, our study focused on investigating uncertainty and assessing the performance of the fuzzy controller under uncertain conditions and disturbance tests. We simulated real-world conditions by applying disturbances with varying amplitudes and demonstrated that our simplified fuzzy controller, which uses only two inputs, manages these challenges.
The results of the simulation and analysis are given in Table 5.
Regarding the quantitative criteria related to the correlation dimension and Lyapunov exponent, in addition to the output value of the model, the absolute value of its difference from the normal level (Rezaee & Kobravi, 2020) was also included in the Table for a better comparison.
According to Table 5, the fuzzy controller with more partitions (FCMR) demonstrates increased accuracy and improved similarity to a healthy human gait compared to other fuzzy controllers. Also, the FCMR controller results in three of the four criteria (DC_thigh, λ_shank, λ_thigh) falling within the normal range, aligning more closely with healthy gait dynamics. Although in the study by Rezaee and Kobravi (2020), there was an effort to approximate healthy walking dynamics, only one criterion (DC_thigh) fell within the normal range. This outcome is attributed to the increased number of fuzzy rules and the absence of overlap in membership functions, as indicated by the correlation dimension and Lyapunov exponent values in the shank and thigh.
In contrast, fuzzy controller with more rules (FCO) exhibited an expanded overlap of membership functions, leading to increased noise and step disturbance tolerance compared to other fuzzy controllers. However, this outcome comes at the cost of reduced accuracy and a larger deviation from the walking dynamics of a healthy person, as indicated by the correlation dimension and Lyapunov exponent values.
Lastly, FCMP suffers from incomplete coverage of the decision space due to an increased number of fuzzy partitions and insufficient rules. Consequently, it exhibits reduced noise and step disturbance tolerance compared to other fuzzy controllers. However, the increased number of fuzzy partitions results in improved accuracy compared to FCO and closer dynamic with normal gait dynamics, as indicated by the values of Dc_shank, λ_shank, and λ_thigh.
4. Discussion
Advantages and conclusions of the proposed work
The primary objective of rehabilitation is to establish a movement pattern that closely resembles the dynamics of a healthy individual. Regrettably, some studies overlook this crucial aspect and focus solely on generating movement in the paralyzed limb without considering the potential harm it can inflict on the neuromuscular system. However, creating effective and goal-oriented rehabilitation, capable of generating and controlling a natural and healthy dynamic, runs into various challenges. On the one hand, the employed simplifications and linearization for modeling purposes, and on the other hand, the uncertainties inherent in the dynamics of biological systems, stemming from their chaotic nature, impede the attainment of a comprehensive understanding and accurate modeling of biological phenomena. Consequently, the only viable approach to tackle this challenge is embracing the true uncertainties in the surrounding world. Rather than disregarding reality and resorting to unnecessary simplifications, the intricate behavior of biological systems arising from their inherent uncertainty should be duly acknowledged when designing the desired control strategy. Effective knowledge management in this uncertain and imprecise world necessitates using appropriate tools. In this research, our primary focus was to develop a fuzzy controller based on the gait basin of attraction concept, leveraging the methodology outlined in the previous study (Rezaee & Kobravi, 2020). We strived to streamline the design of the controller, aiming to create a simplified structure that incorporates only two inputs. However, our main objective is to emphasize the significant role of proper management of uncertainty and imprecision knowledge in gait dynamics.
The fuzzy rules used in this study are developed through a comprehensive process that integrates simulation experiments and expert knowledge. This approach ensures the final rules are accurately tuned to meet system requirements and enhance controller performance. Our findings highlight the potential of fuzzy logic in managing the nonlinear dynamics of walking and enhancing gait performance, with implications for rehabilitation. The fuzzy logic-based controller offers a transparent structure and robust solution by effectively addressing uncertainties. This study underscores the importance of addressing these challenges and sheds light on the role of fuzzy logic in gait rehabilitation.
Although this study explicitly models and controls only two joints; using FES and ankle-foot orthoses is crucial in approximating healthy walking patterns. FES stimulates the knee and hip muscles, while the orthosis supports and stabilizes the ankle and foot, allowing the study to achieve gait patterns similar to those of a healthy subject. As shown in the results section, our investigation reveals that increasing the number of fuzzy rules and partitions enhances the output accuracy and gait dynamics' similarity to a healthy human. In contrast, incomplete coverage of the decision space due to an increased number of fuzzy partitions and insufficient rules reduces the controller's robustness. On the other hand, expanding the overlap of membership functions reduces the output accuracy but improves the robustness of the control strategy. This study demonstrates the effective management of uncertainties and imprecisions in system dynamics by adjusting the number of fuzzy rules, partitions, and membership function overlaps. Despite the simplicity of the designed controller structure with only two inputs, it outperforms the study of Rezaee and Kobravi (2020) due to its proper handling of the existing uncertainties and imprecisions in walking dynamics. In other words, these results indicate that a well-designed fuzzy controller, even with a simplified structure, can maintain stability and accuracy under challenging conditions. This improvement is due to the careful design of fuzzy rules, appropriate partitioning, and proper overlap of membership functions, which provide a more resilient control strategy.
Limitations of the proposed work
Whereas the study dataset was acquired from five volunteers during three uninterrupted gait cycles, more participants with different ages and genders and more gait cycles were needed to conclude the process accurately.
Future works
The employed control strategy can be used not only for people who are completely paralyzed but also for people who have muscle weakness. We hope to integrate the proposed strategy with an exoskeleton robot at the next step of this research. Also, we intend to consider the controller output as multi-variable in the future so that a separate control signal applies to each of the agonist and antagonist muscles of the knee and hip joints.
Ethical Considerations
Compliance with ethical guidelines
As this study used data from Rezaee and Kobravi's (2020) study, ethical approval was not required.
Funding
This research received no specific grant from funding agencies in the public, commercial or not-for-profit sectors.
Authors' contributions
Conceptualization, methodology, visualization, and visualization, All authors; Data curation, formal analysis, software, writing the original draft, Zohre Rezaee; Supervision, review and editing: Mohammad-R Akbarzadeh-T.
Conflict of interest
The authors declared no conflict of interest.
Acknowledgments
The authors have to express their sincere thanks to Hamidreza Kobravi for generously providing us with his database.
References
Andrews, B. J., Baxendale, R. H., Barnett, R., Phillips, G. F., Yamazaki, T., & Paul, J. P., et al. (1988). Hybrid FES orthosis incorporating closed loop control and sensory feedback. Journal of Biomedical Engineering, 10(2), 189–195. [DOI:10.1016/0141-5425(88)90099-4] [PMID]
Brunetti, F., Garay, A., Moreno, J.C., Pons, J.L. (2011). Enhancing functional electrical stimulation for emerging rehabilitation robotics in the framework of HYPER project. Paper presented at: 2011 IEEE International Conference on Rehabilitation Robotics: Zurich: Switzerland: 29 June 2011. [DOI:10.1109/ICORR.2011.5975370]
Chen, M., Wu, B., Lou, X., Zhao, T., Li, J., & Xu, Z., et al. (2013). A self-adaptive foot-drop corrector using functional electrical stimulation (FES) modulated by tibialis anterior electromyography (EMG) dataset. Medical Engineering & Physics, 35(2), 195–204. [DOI:10.1016/j.medengphy.2012.04.016] [PMID]
Ding, Y., Kastin, A. J., & Pan, W. (2005). Neural plasticity after spinal cord injury. Current Pharmaceutical Design, 11(11): 1441–1450. [DOI:10.2174/1381612053507855] [PMID]
Díaz, I., Gil, J.J., Sánchez, E. (2011). Lower-limb robotic rehabilitation, Literature review and challenges. Journal of Robotics, 2011, 1-11. [DOI:10.1155/2011/759764]
del-Ama, A. J., Gil-Agudo, A., Pons, J. L., & Moreno, J. C. (2014). Hybrid FES-robot cooperative control of ambulatory gait rehabilitation exoskeleton. Journal of Neuroengineering and Rehabilitation, 11: 27. [DOI:10.1186/1743-0003-11-27] [PMID]
Dosen, S., & Popović, D. B. (2009). Moving-window dynamic optimization, Design of stimulation profiles for walking. IEEE Transactions on Bio-Medical Engineering, 56(5), 1298–1309.[DOI:10.1109/TBME.2009.2013935] [PMID]
deGuzman, G. C., & Kelso, J. A. (1991). Multifrequency behavioral patterns and the phase attractive circle map. Biological Cybernetics, 64(6), 485–495. [DOI:10.1007/BF00202613] [PMID]
Foroutannia, A., Akbarzadeh-T, M. R., & Akbarzadeh, A. (2022). A deep learning strategy for EMG-based joint position prediction in hip exoskeleton assistive robots. Biomedical Signal Processing and Control, 75, 103557. [DOI:10.1016/j.bspc.2022.103557]
Fu, C., Suzuki, Y., Kiyono, K., Morasso, P., & Nomura, T. (2014). An intermittent control model of flexible human gait using a stable manifold of saddle-type unstable limit cycle dynamics. Journal of the Royal Society, Interface, 11(101): 20140958. [DOI:10.1098/rsif.2014.0958] [PMID]
Hilborn, R. C. (2000). Chaos and nonlinear system, An introduction for scientists and engineers (2nd ed.). Oxford: Oxford University Press. [DOI:10.1093/acprof:oso/9780198507239.001.0001]
Johansson B. B. (2007). Regeneration and plasticity in the brain and spinal cord. Journal of Cerebral Blood Flow and Metabolism, 27(8), 1417–1430. [DOI:10.1038/sj.jcbfm.9600486] [PMID]
Jensen, M. H., Bak, P., & Bohr, T. (1984). Transition to chaos by interaction of resonances in dissipative systems. I. Circle maps. Physical review A, 30(4), 1960. [DOI:10.1103/PhysRevA.30.1960]
Kimura, R., Matsunaga, T., Iwami, T., Kudo, D., Saitoh, K., & Hatakeyama, K., et al. (2018). Development of a rehabilitation robot combined with functional electrical stimulation controlled by non-disabled lower extremity in hemiplegic gait. Progress in Rehabilitation Medicine, 3, 20180005. [DOI:10.2490/prm.20180005] [PMID]
Lyons, G.M., Wilcox, D.J., Lyons, D.J., Hilton, D. (2000). Evaluation of a drop foot stimulator FES intensity envelope matched to tibialis anterior muscle activity during walking. Proceedings of the 5th Annual Conference of the International Functional Electrical Stimulation Society. Aalborg: Denmark, 20 June 2000. [Link]
Marchal-Crespo, L., & Reinkensmeyer, D. J. (2009). Review of control strategies for robotic movement training after neurologic injury. Journal of Neuroengineering and Rehabilitation, 6, 20. [DOI:10.1186/1743-0003-6-20] [PMID]
Meng, W., Liu, Q., Zhou, Z., Ai, Q., Sheng, B., & Xie, S. S. (2015). Recent development of mechanisms and control strategies for robot-assisted lower limb rehabilitation. Mechatronics, 31, 132-145. [DOI:10.1016/j.mechatronics.2015.04.005]
Nekoukar, V., Erfanian, A. (2011). An adaptive fuzzy sliding mode controller design for walking control with functional electrical stimulation: A computer simulation study. International Journal of Control, Automation and Systems, 9(6), 1124-35. [DOI:10.1007/s12555-011-0614-4]
Nekoukar, V., & Erfanian, A. (2012). A decentralized modular control framework for robust control of FES-activated walker-assisted paraplegic walking using terminal sliding mode and fuzzy logic control. IEEE Transactions on Bio-Medical Engineering, 59(10), 2818–2827. [DOI:10.1109/TBME.2012.2208963] [PMID]
O'Keeffe, D. T., Donnelly, A. E., & Lyons, G. M. (2003). The development of a potential optimized stimulation intensity envelope for drop foot applications. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 11(3), 249–256. [DOI:10.1109/TNSRE.2003.817678] [PMID]
Popović, D., Stein, R. B., Oğuztöreli, N., Lebiedowska, M., & Jonić, S. (1999). Optimal control of walking with functional electrical stimulation: A computer simulation study. IEEE Transactions on Rehabilitation Engineering, 7(1), 69–79. [DOI:10.1109/86.750554] [PMID]
Rezaee, Z., & Kobravi, H. R. (2020). Human gait control using functional electrical stimulation based on controlling the shank dynamics. Basic and Clinical Neuroscience, 11(1), 1–14. [DOI:10.32598/bcn.11.1.173.2] [PMID]
Shi, D., Zhang, W., Zhang, W., Ding, X. (2019). A review on lower limb rehabilitation exoskeleton robots. Chinese Journal of Mechanical Engineering, 32(1), 1-11. [DOI:10.1186/s10033-019-0389-8]
Viteckova, S., Kutilek, P., & Jirina, M. (2013). Wearable lower limb robotics: A review. Biocybernetics and Biomedical Engineering, 33(2), 96-105. [DOI:10.1016/j.bbe.2013.03.005]
Zhou, J., Yang, S., Xue, Q. (2021). Lower limb rehabilitation exoskeleton robot: A review. Advances in Mechanical Engineering, 13(4). [DOI:10.1177/16878140211011862]
Type of Study: Original |
Subject:
Computational Neuroscience
Received: 2024/07/29 | Accepted: 2024/09/9 | Published: 2025/01/1
Received: 2024/07/29 | Accepted: 2024/09/9 | Published: 2025/01/1
Send email to the article author
| Rights and permissions | |
 |
This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License. |
![]()
Copyright © The Author(s);
This is an open access article distributed under the terms of the Creative Commons Attribution License (CC-By-NC), which permits use, distribution, and reproduction in any medium, provided the original work is properly cited and is not used for commercial purposes.
Contact Information