
Volume 12, Issue 4 (July & August 2021)
BCN 2021, 12(4): 441-452 |
Back to browse issues page



Download citation:
BibTeX | RIS | EndNote | Medlars | ProCite | Reference Manager | RefWorks
Send citation to:



BibTeX | RIS | EndNote | Medlars | ProCite | Reference Manager | RefWorks
Send citation to:
Rastegar M, Kobravi H R. A Hybrid-FES Based Control System for Knee Joint Movement Control. BCN 2021; 12 (4) :441-452
URL: http://bcn.iums.ac.ir/article-1-1488-en.html
URL: http://bcn.iums.ac.ir/article-1-1488-en.html



1- Department of Biomedical Engineering, Research Center of Biomedical Engineering, Islamic Azad University of Mashhad, Mashhad, Iran.
Keywords: Functional Electrical Stimulation (FES), Hybrid neuroprosthesis, Movement control, Rehabilitation, Knee
Full-Text [PDF 1331 kb]
| Abstract (HTML)
.png)
Full-Text:
1. Introduction
Neural system injuries often inflict untreatable disability on the affected patients. Thus, rehabilitation can play an essential and effective role in the maximal restoration of daily activities for such patients. One of the well-known technologies with an expansive application is exoskeleton robots. These systems are wearable robots that can provide the required joint torques required for human movement. Accordingly, the exoskeletons are used to rehabilitate individuals with a disability in a certain part of their body. These robots can be applied to different parts of the body, including the arms, the legs, the waist, and so on (Bai, Virk, & Sugar, 2018). A large body of literature explored exoskeletons. Some of the reported works are focused on the rehabilitation of the lower limbs (del-Ama, Gil-Agudo, Pons, & Moreno, 2014; Del-Ama et al., 2015; Ha, Murray, & Goldfarb, 2015; Bortole et al., 2015; Ren, & Zhanget, 2014; Chen, Qi, Guo, & Yu, 2016). Different categories of adaptive and non-adaptive control strategies were applied for position control or torque control in the exoskeletons (del-Ama et al., 2014; Parsa, & Farrokhi, 2010; Wittmann, Hildebrandt, Wahrmann, Rixen, & Buschmann, 2015; Wang, Wu, Guo, & Zhang, 2016; Kirsch, Bao, Alibeji, Dicianno, & Sharma, 2017; Shen, Sun, & Sun, 2014; Anh, Huan, & Nam, 2014). The servo-motors are usually are used as the main actuators of such robots (Zhang, Ren, Gui, Jia, & Xu, 2017; Gilbert, Zhang, & Yin, 2016). Some acceptable reported results convince the researcher to believe in the exoskeletons as promising rehabilitation technology. Nevertheless, this technology encounters some limitations.
Another group of well-known tools for rehabilitation are technologies that work based on Functional Electrical Stimulation (FES). The FES-based devices deliver the electrical pulses to the involved muscle nerves to restore movement. Multiple studies focused on adopting the FES for the movement control of the paralyzed limbs. However, the rapid occurrence of muscle fatigue and the need for multidimensional control of the limbs are the main limitations of the FES systems (Franken, Veltink, Fidder, & Boom, 1993).
Considering the advantages and disadvantages of exoskeletons and functional electrical stimulation, by combining these two technologies, one can cover up the shortcomings related to each (Bortole et al., 2015). In this regard, some prominent studies were conducted (del-Ama et al., 2014; Ha et al., 2014; Bortole et al., 2015; Ren, et al., 2014). For example, the Kinesis robot was presented for individuals with cerebral palsy (del-Ama. et al., 2014). It was designed to result in the least possible muscular fatigue for the patient. It uses a concurrency mechanism between the robot and functional electrical stimulation. This robot offers walking control and rehabilitation for the patient (del-Ama. et al., 2014). In another study, a combinatory system, composed of lower extremity limb exoskeleton and functional electrical stimulation, was investigated for the restoration of walking in individuals with paraplegia (Ha et al., 2014; Tu, Huang, & He, 2014; Anaya, Thangavel, & Yu, 2018). The presence of external and internal disturbance due to muscles and joints is of critical significance. Considering the presence of disturbance, an external rehabilitative robot based on a predicative control model and nonlinear predictive control was proposed in the following research studies (Parsa & Farrokhi, 2010; Wittmann et al., 2015; Wang et al., 2016; Kirsch, Alibeji, & Sharma, 2017).
As mentioned earlier, the main limitation of the FES system is expediting the occurrence of muscle fatigue. Therefore, in the FES-hybrid rehabilitation robots, optimally activating the FES system during a specific period can potentially postpone the occurrence of muscle fatigue. A study proposed two FES allocations (Kirsch, Alibeji, & Sharma, 2017). Using this allocation scenario, the input efforts were allocated between motor and FES (Kirsch, Alibeji, & Sharma, 2017). The desired input ratio was adapted as per the estimated fatigue (Kirsch, Alibeji, & Sharma, 2017). However, accurately estimating muscle fatigue can be challenging. Therefore, in this paper, a control approach was proposed to intermittently use FES along with an active actuator to control the knee joint position in a muscle-joint model. In other words, the underlying idea of this study is intermittently applying the FES to not only preserve control performance but also delay the occurrence of muscular fatigue.
2. Methods
A proposed approach for movement control using functional electrical stimulation along with active mechanical orthosis is presented. In this approach, two different controllers are used to determine stimulation intensity and provide motor torque; where a PD controller is applied to adjust the stimulation intensity, and an adaptive neural PID controller is used to determine the motor torque. Figure 1 demonstrates the structure of the adopted control system.
.png)
According to the proposed strategy, the value of the exerted torque to the joint emerges from synergetic cooperation between two closed-loop controllers. Thus, a PD controller determines the electrical stimulation intensity and an adaptive PID controller determines the input current of the mechanical motor. According to the designed decision-making algorithm, the electrical stimulation signals are delivered whenever an external disturbance is observed using an envisioned disturbance observer. The performance of the control system was evaluated using a quantitative measure called the Root Mean Square (RMS) of the tracking error, as illustrated by Equation 1.

Where θd and θt are the vector of the desired knee movement trajectory and the actual knee movement trajectory, respectively. The proposed closed-loop control strategy will be elaborated in the following sections.
In this study, a nonlinear and physiological model was used as the muscle-joint model (Riener & Edrich, 1999). The used model describes the movement of the knee joint angle in the sagittal plane. Figure 1 shows the used muscle-joint structure (Riener & Edrich, 1999). Three parts, called muscle activation part, muscle contraction part, and segmental dynamics part accounted for the main parts of the model (Riener & Edrich, 1999). The muscular part of the model describes the moment-velocity, the moment-angle properties of the muscle, and the muscle recruitment curve describes the muscle activation property. The segmental dynamics part describes the shank movement dynamics along with the mechanical properties of the knee joint, such as joint viscosity and joint elasticity. All model equations and model parameters were determined according to the previous reports (Ferrarin, Palazzo, Riener, & Quintern, 1999; Riener & Edrich, 1999) (Figure 2).
.png)
The used muscle-joint model does not simulate the process of muscle fatigue during the knee joint movement ensued from muscle electrical stimulation. To evaluate the control strategy in the presence of muscle fatigue, we multiplied the value of the total generated torque (Mtot, Figure 1) by a time decreasing exponential coefficient, Equation 2:
Where Mtot is the total output torque (Figure 1), and t presents the time.
Adaptive PID controller
An adaptive PID controller determines the input current of the mechanical motor. In this study, a neural PID was used and its parameters were adjusted based on an error back-propagation mechanism (Anh, Huan, & Nam, 2014). The PID output is described Equation 3:
where f is the Hyperbolic tangent function, x is the input of the controller and the and k is the bias weighting values of the output layer and hidden layer, respectively (Anh, Huan, & Nam, 2014). Furthermore, the x as the controller input is Equation 4:

Where Kp,Ki,Kd are the weighting values of the input layer and Bi is the bias value of the input layer, and ep (k), ei (k) ed (k) are the output tracking error, the discretized derivative of the output tracking error, and the discretized integral of the output tracking error.
The parameters of the controller can be tuned in an online manner using the Fast Learning Back Propagation (FLBP) algorithm. The extracted updating laws are Equation 5, 6, 7, 8, 9 and 10 (Anh, Huan, & Nam, 2014):






where ɳ ɳp,ɳi,ɳd,ɳBi,and ɳBh are the learning rates, O(k) is f(x(k)) and Δ is ,
Disturbance observer and decision-making process
The electrical stimulation signals are delivered whenever an external disturbance is observed using an envisioned disturbance observer. The quantitative effect of the external disturbance was considered as an added term in the equation of the state-space model of the system Equation 11 (Wang et al., 2016):

represents the state variable, the system input, and external disturbance. The f(x), (x),(x), and h(x) describe the nonlinear dynamics of the system states, system inputs, external disturbance, and the output signal, respectively. Besides, it is assumed that a linear model describes the disturbance dynamics. Equation 12 demonstrates the external disturbance dynamics, as follow:
A disturbance observer was used to detect the disturbance. The dynamics of the disturbance observer are described by Equations 13, 14 and 15.


where ξ ε Rn, is state variable of the state-space model of the disturbance, d ̂ε R is the observed disturbance, and A and C represent the parameters of the state-space model of the disturbance. Additionally, L is the derivative of the function f, and the K, as the gain, is equal to 10.
After observing the disturbance and according to the value of the disturbance, the PD controller is activated whenever the value of the observed disturbance is greater than a specific value. In other words, the electrical stimulation is delivered to the muscle and the PD controller determines the stimulation intensity. According to the applied decision-making mechanism, the PD controller, as the FES controller, is activated whenever the observed disturbance (d ̂) is larger than 5.
Active mechanical actuator
In this study, the modeled mechanical motor, as an active mechanical actuator, was used as an AC servo motor comprised of two parts; servo driver and feedback encoder (Gilbert, Zhang, & Yin, 2016). The used servo motor had 3 states, including position control, speed control, and torque control. Figure 3 shows the structure of the used model as the AC servo motor.
.png)
As per Figure 3, the parameters of the model (Equation 2):
Uq =input voltage (Ω)
R= winding equivalent inductance (V)
L= equivalent inductance (H)
Kc =torque coefficient
Tc=torque(Nm)
Pn =number of pole pairs
фf =rotor flux field equivalent(wb)
TL =load torque(Nm)
J=moment inertia(kgm^2)
ωr =rotor angular velocity(rad/s)
All parameters of the motor model were determined according to previous reports (Equation 2).
Knee joint movement trajectory
The reference trajectory of knee joint movement control was envisioned using recorded human data. The required data were recorded from 5 healthy subjects. Table 1 indicates the information related to the study participants.
.png)
After preparing the study subjects, data recording was commenced. The research subjects were requested to take 9 steps on the designated sheet, irrespective of time and conforming to their natural speed. In other words, no restrictions were imposed on gait length or walking speed. The kinematic information of the knee joint angle was recorded using a motion analyses system. The sampling frequency equaled 100 Hz. Figure 4 shows how the markers used for motion analyses were located on the leg.
Neural system injuries often inflict untreatable disability on the affected patients. Thus, rehabilitation can play an essential and effective role in the maximal restoration of daily activities for such patients. One of the well-known technologies with an expansive application is exoskeleton robots. These systems are wearable robots that can provide the required joint torques required for human movement. Accordingly, the exoskeletons are used to rehabilitate individuals with a disability in a certain part of their body. These robots can be applied to different parts of the body, including the arms, the legs, the waist, and so on (Bai, Virk, & Sugar, 2018). A large body of literature explored exoskeletons. Some of the reported works are focused on the rehabilitation of the lower limbs (del-Ama, Gil-Agudo, Pons, & Moreno, 2014; Del-Ama et al., 2015; Ha, Murray, & Goldfarb, 2015; Bortole et al., 2015; Ren, & Zhanget, 2014; Chen, Qi, Guo, & Yu, 2016). Different categories of adaptive and non-adaptive control strategies were applied for position control or torque control in the exoskeletons (del-Ama et al., 2014; Parsa, & Farrokhi, 2010; Wittmann, Hildebrandt, Wahrmann, Rixen, & Buschmann, 2015; Wang, Wu, Guo, & Zhang, 2016; Kirsch, Bao, Alibeji, Dicianno, & Sharma, 2017; Shen, Sun, & Sun, 2014; Anh, Huan, & Nam, 2014). The servo-motors are usually are used as the main actuators of such robots (Zhang, Ren, Gui, Jia, & Xu, 2017; Gilbert, Zhang, & Yin, 2016). Some acceptable reported results convince the researcher to believe in the exoskeletons as promising rehabilitation technology. Nevertheless, this technology encounters some limitations.
Another group of well-known tools for rehabilitation are technologies that work based on Functional Electrical Stimulation (FES). The FES-based devices deliver the electrical pulses to the involved muscle nerves to restore movement. Multiple studies focused on adopting the FES for the movement control of the paralyzed limbs. However, the rapid occurrence of muscle fatigue and the need for multidimensional control of the limbs are the main limitations of the FES systems (Franken, Veltink, Fidder, & Boom, 1993).
Considering the advantages and disadvantages of exoskeletons and functional electrical stimulation, by combining these two technologies, one can cover up the shortcomings related to each (Bortole et al., 2015). In this regard, some prominent studies were conducted (del-Ama et al., 2014; Ha et al., 2014; Bortole et al., 2015; Ren, et al., 2014). For example, the Kinesis robot was presented for individuals with cerebral palsy (del-Ama. et al., 2014). It was designed to result in the least possible muscular fatigue for the patient. It uses a concurrency mechanism between the robot and functional electrical stimulation. This robot offers walking control and rehabilitation for the patient (del-Ama. et al., 2014). In another study, a combinatory system, composed of lower extremity limb exoskeleton and functional electrical stimulation, was investigated for the restoration of walking in individuals with paraplegia (Ha et al., 2014; Tu, Huang, & He, 2014; Anaya, Thangavel, & Yu, 2018). The presence of external and internal disturbance due to muscles and joints is of critical significance. Considering the presence of disturbance, an external rehabilitative robot based on a predicative control model and nonlinear predictive control was proposed in the following research studies (Parsa & Farrokhi, 2010; Wittmann et al., 2015; Wang et al., 2016; Kirsch, Alibeji, & Sharma, 2017).
As mentioned earlier, the main limitation of the FES system is expediting the occurrence of muscle fatigue. Therefore, in the FES-hybrid rehabilitation robots, optimally activating the FES system during a specific period can potentially postpone the occurrence of muscle fatigue. A study proposed two FES allocations (Kirsch, Alibeji, & Sharma, 2017). Using this allocation scenario, the input efforts were allocated between motor and FES (Kirsch, Alibeji, & Sharma, 2017). The desired input ratio was adapted as per the estimated fatigue (Kirsch, Alibeji, & Sharma, 2017). However, accurately estimating muscle fatigue can be challenging. Therefore, in this paper, a control approach was proposed to intermittently use FES along with an active actuator to control the knee joint position in a muscle-joint model. In other words, the underlying idea of this study is intermittently applying the FES to not only preserve control performance but also delay the occurrence of muscular fatigue.
2. Methods
A proposed approach for movement control using functional electrical stimulation along with active mechanical orthosis is presented. In this approach, two different controllers are used to determine stimulation intensity and provide motor torque; where a PD controller is applied to adjust the stimulation intensity, and an adaptive neural PID controller is used to determine the motor torque. Figure 1 demonstrates the structure of the adopted control system.
According to the proposed strategy, the value of the exerted torque to the joint emerges from synergetic cooperation between two closed-loop controllers. Thus, a PD controller determines the electrical stimulation intensity and an adaptive PID controller determines the input current of the mechanical motor. According to the designed decision-making algorithm, the electrical stimulation signals are delivered whenever an external disturbance is observed using an envisioned disturbance observer. The performance of the control system was evaluated using a quantitative measure called the Root Mean Square (RMS) of the tracking error, as illustrated by Equation 1.
Where θd and θt are the vector of the desired knee movement trajectory and the actual knee movement trajectory, respectively. The proposed closed-loop control strategy will be elaborated in the following sections.
In this study, a nonlinear and physiological model was used as the muscle-joint model (Riener & Edrich, 1999). The used model describes the movement of the knee joint angle in the sagittal plane. Figure 1 shows the used muscle-joint structure (Riener & Edrich, 1999). Three parts, called muscle activation part, muscle contraction part, and segmental dynamics part accounted for the main parts of the model (Riener & Edrich, 1999). The muscular part of the model describes the moment-velocity, the moment-angle properties of the muscle, and the muscle recruitment curve describes the muscle activation property. The segmental dynamics part describes the shank movement dynamics along with the mechanical properties of the knee joint, such as joint viscosity and joint elasticity. All model equations and model parameters were determined according to the previous reports (Ferrarin, Palazzo, Riener, & Quintern, 1999; Riener & Edrich, 1999) (Figure 2).
The used muscle-joint model does not simulate the process of muscle fatigue during the knee joint movement ensued from muscle electrical stimulation. To evaluate the control strategy in the presence of muscle fatigue, we multiplied the value of the total generated torque (Mtot, Figure 1) by a time decreasing exponential coefficient, Equation 2:
Where Mtot is the total output torque (Figure 1), and t presents the time.
Adaptive PID controller
An adaptive PID controller determines the input current of the mechanical motor. In this study, a neural PID was used and its parameters were adjusted based on an error back-propagation mechanism (Anh, Huan, & Nam, 2014). The PID output is described Equation 3:
where f is the Hyperbolic tangent function, x is the input of the controller and the and k is the bias weighting values of the output layer and hidden layer, respectively (Anh, Huan, & Nam, 2014). Furthermore, the x as the controller input is Equation 4:
Where Kp,Ki,Kd are the weighting values of the input layer and Bi is the bias value of the input layer, and ep (k), ei (k) ed (k) are the output tracking error, the discretized derivative of the output tracking error, and the discretized integral of the output tracking error.
The parameters of the controller can be tuned in an online manner using the Fast Learning Back Propagation (FLBP) algorithm. The extracted updating laws are Equation 5, 6, 7, 8, 9 and 10 (Anh, Huan, & Nam, 2014):
where ɳ ɳp,ɳi,ɳd,ɳBi,and ɳBh are the learning rates, O(k) is f(x(k)) and Δ is ,
Disturbance observer and decision-making process
The electrical stimulation signals are delivered whenever an external disturbance is observed using an envisioned disturbance observer. The quantitative effect of the external disturbance was considered as an added term in the equation of the state-space model of the system Equation 11 (Wang et al., 2016):
represents the state variable, the system input, and external disturbance. The f(x), (x),(x), and h(x) describe the nonlinear dynamics of the system states, system inputs, external disturbance, and the output signal, respectively. Besides, it is assumed that a linear model describes the disturbance dynamics. Equation 12 demonstrates the external disturbance dynamics, as follow:
A disturbance observer was used to detect the disturbance. The dynamics of the disturbance observer are described by Equations 13, 14 and 15.
where ξ ε Rn, is state variable of the state-space model of the disturbance, d ̂ε R is the observed disturbance, and A and C represent the parameters of the state-space model of the disturbance. Additionally, L is the derivative of the function f, and the K, as the gain, is equal to 10.
After observing the disturbance and according to the value of the disturbance, the PD controller is activated whenever the value of the observed disturbance is greater than a specific value. In other words, the electrical stimulation is delivered to the muscle and the PD controller determines the stimulation intensity. According to the applied decision-making mechanism, the PD controller, as the FES controller, is activated whenever the observed disturbance (d ̂) is larger than 5.
Active mechanical actuator
In this study, the modeled mechanical motor, as an active mechanical actuator, was used as an AC servo motor comprised of two parts; servo driver and feedback encoder (Gilbert, Zhang, & Yin, 2016). The used servo motor had 3 states, including position control, speed control, and torque control. Figure 3 shows the structure of the used model as the AC servo motor.
As per Figure 3, the parameters of the model (Equation 2):
Uq =input voltage (Ω)
R= winding equivalent inductance (V)
L= equivalent inductance (H)
Kc =torque coefficient
Tc=torque(Nm)
Pn =number of pole pairs
фf =rotor flux field equivalent(wb)
TL =load torque(Nm)
J=moment inertia(kgm^2)
ωr =rotor angular velocity(rad/s)
All parameters of the motor model were determined according to previous reports (Equation 2).
Knee joint movement trajectory
The reference trajectory of knee joint movement control was envisioned using recorded human data. The required data were recorded from 5 healthy subjects. Table 1 indicates the information related to the study participants.
After preparing the study subjects, data recording was commenced. The research subjects were requested to take 9 steps on the designated sheet, irrespective of time and conforming to their natural speed. In other words, no restrictions were imposed on gait length or walking speed. The kinematic information of the knee joint angle was recorded using a motion analyses system. The sampling frequency equaled 100 Hz. Figure 4 shows how the markers used for motion analyses were located on the leg.
3. Results
In the first section of simulated studies, we assessed the control strategy under the conditions in which no external disturbances were applied. In such a context, the electrical stimulation is not delivered. In other words, only the PID controller was activated. Initially, a nonadaptive PID, then an adaptive PID were used.
As per Figure 5, there existed considerable tracking error and phase delay between the reference knee joint trajectories and the obtained actual.
.png)
The calculated RMS of the tracking error was measured as 202 degrees. This finding may be attributed to the nonlinearity of the model, even when no disturbance is applied to the system, appropriate, or acceptable efficiency is not achieved.
As per Figure 6, even when using adaptive control, there exists considerable tracking error and phase delay between the reference knee joint trajectories and the obtained actual.
.png)
The tracking performance was improved; however, the calculated RMS of the tracking error equaled 20 degrees. Such an unacceptable performance can be attributed to some system nonlinearity which the controller failed to cope with them.
In the next step, for improving the performance of the adaptive PID, a PD compensator was added. The control signal is the aggregation of the two control signals. One is the adaptive PID output and the other is the compensator output as Equation 16 describes.
According to Figure 7, adopting the PD compensator along with the adaptive PID significantly improved the performance.
.png)
The computed RMS of the tracking error was computed as 3. Since the range of knee angle variation is approximately 80 degrees, such a value of the tracking error can be acceptable. In other words, such results can be construed as a sign of good performance of the control strategy. Besides, as expected, the FES controller was deactivated during the control process. No disturbance was applied during the control process.
The RMS of the tracking error while the recorded trajectories related to the different subjects were used as the desired trajectory, were computed. Table 2 presents the computed values.
.png)
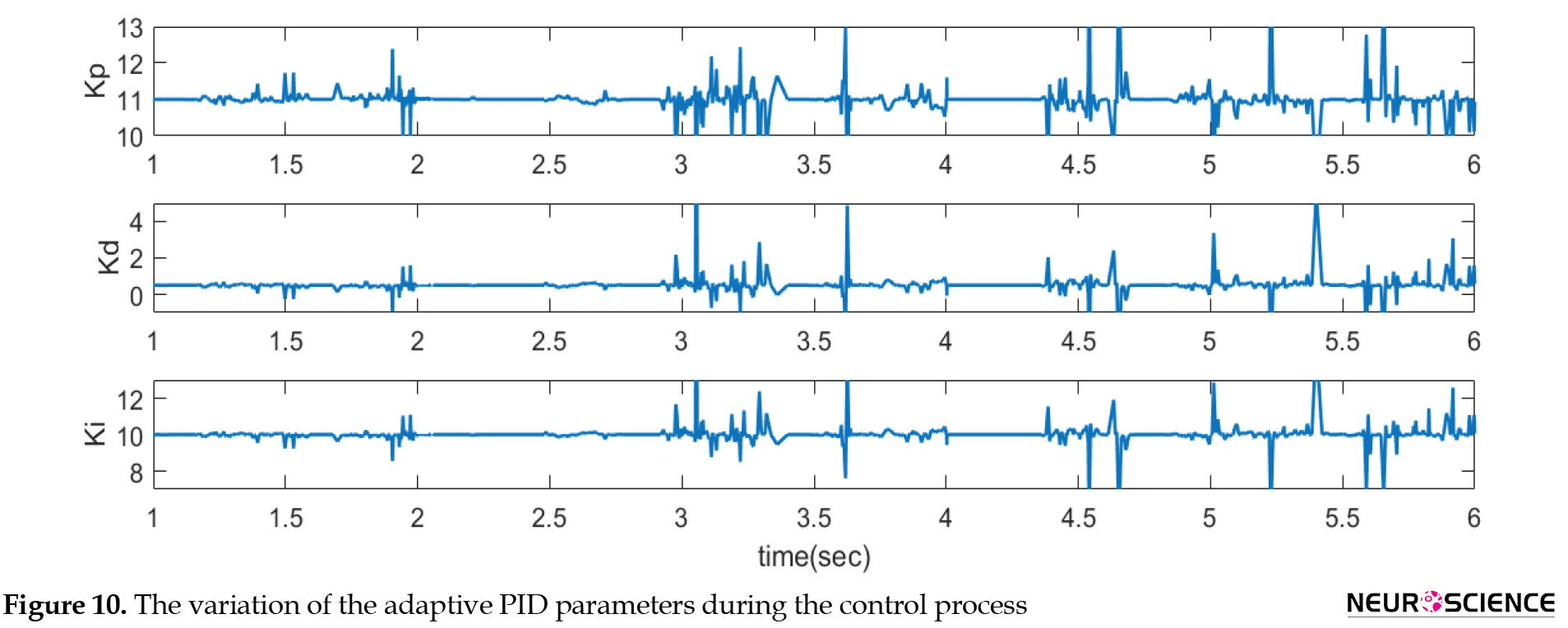
The computed Mean±SD value was 2.6±0.36. The range of knee angle variation was about 80 degrees; thus, such value of the tracking error can be acceptable. The desired trajectory is related to human data. The human gait is rhythmic and not periodic; therefore, we expect that the controller parameters do not converge to the fixed level. Figure 6 manifests the variations of the adaptive PID parameters during the process. The controller parameters did not converge to the fixed values. Besides, whenever the slope of the desired trajectory changes, the dynamics of parameters variations alter. It reflects the ability of the controller to adapt its behavior according to the different dynamics of the reference trajectory (Figure 8).
.png)
In the next step of the research, an external disturbance, as an additive torque was applied to the knee at two-time intervals. Each time interval lasted two seconds. As explained previously, the disturbance dynamics was as Equation 12. Without the presence of the disturbance, using the adaptive PID along with the PD compensator led to the best results. Therefore, in this step, only the adaptive PID along with the PD compensator was evaluated. illustrates a sample achieved result. Firstly, it ranged between 2 to 2.2 s and secondly between 4 to 4.2 s. The external disturbance was applied during two periods. As expected, the FES controller was activated exactly during applying the disturbance. The elicited torque aroused from delivering the electrical stimulation to the muscle has provided the torque, i.e., not generated using the active motor. Once the external disturbance was removed, the stimulation signal was reduced to zero again. The RMS of the tracking error while the recorded trajectories related to the different subjects were used as the desired trajectory, were computed. Table 3 presents the computed values.
.png)
The computed average values of the RMS seem to be acceptable if one considers the range of knee joint motion (80 degrees).
As per Figure 9, once the elicited torque aroused from the FES was increased, the generated torque by the active motor significantly decreased.
.png)
It indicates that using the FES yields the need for low mechanical power servo-motor for annihilating the disturbance. During applying the disturbance the FES has provided the necessary torque; however, the stability of the control system should also be preserved. Therefore, as Figure 9 shows the variations of the adaptive PID parameters were not stopped even when the FES controller was active. Muscle fatigue is a limiting factor in FES (Franken, Veltink, Fidder, & Boom, 1993). It is expected that in the FES-Hybrid system, incorporating the FES where the FES system is activated only during specific time intervals may lead to postponing the occurrence of muscle fatigue. In the proposed control approach, the FES controller (APD controller) was activated only when an external disturbance was observed. Therefore, it is expected that muscle fatigue can be compensated using the proposed control strategy (Figure 10).
We used a decreasing exponential coefficient in the muscle model to simulate the muscle fatigue process. Figure 11 shows a sample achieved result.
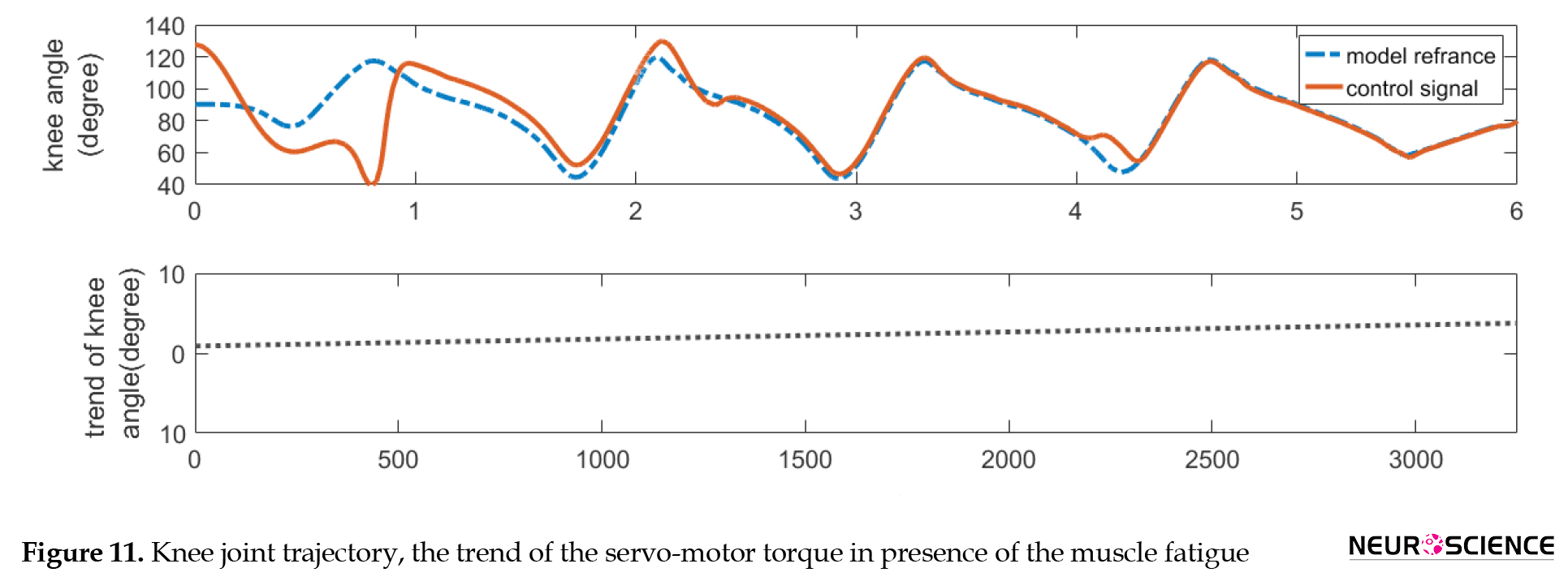
Despite the presence of muscle fatigue, the performance of the controller has not been degraded. Besides, the trend of the motor torque is increasing. It demonstrates the ability of the adaptive PID controller to compensate the muscle fatigue due to gradually increasing the level of the mechanical motor torque.
The RMS of the tracking error while the recorded trajectories related to the different subjects were used as the desired trajectory, were computed. Table 4 indicates the computed values.
.png)
The computed average values of the RMS seem to be acceptable if one considers the range of knee joint motion (80 degrees).
4. Discussion
The reference trajectory of knee movement was designed using human data. The situation of the patients may be different in reality, individualizing the exoskeleton makes them more efficient. Therefore, in this simulation study, the controller performance was evaluated while different trajectories related to the different human subjects were used as the desired knee movement trajectory. The specifications of the gait dynamics in each subject differ from the others; thus, assessing the controller under such conditions could elucidate the ability of the proposed control strategy to control the exoskeleton movement in an individualized manner. According to the obtained results, the controller performance was not degraded owing to changing the knee reference trajectory (Tables 2, 3 & 4). Such promising results can hearten us about the prospective application of this control strategy.
In this study, the FES was used along with the active actuator to compensate for the effects of the external disturbance. However, the main limitation of the FES system is expediting the occurrence of muscle fatigue. Therefore, a decision-making approach was applied to activate the FES controller only whenever a designed disturbance observer detects the presence of an external disturbance. Accordingly, the presence of the FES is not only effective but also the occurrence of muscle fatigue can be postponed as much as possible. The achieved results certify the underlying idea. Thus, the value of computed RMS of the tracking error in the presence of the muscle fatigue and the corresponding value computed without the presence of the muscle fatigue are comparable (Table 3 & 4). Such results can prove that the proposed decision-making strategy prevented the rapid occurrence of muscle fatigue. Besides, during applying the disturbance the elicited torque by FES could provide the needed torque. Therefore, a low mechanical power motor can be enough to provide the needed toque to annihilate the external disturbance. This is a considerable benefit because a low mechanical power motor is the low weight with small size which can be useful for implementing an FES-Hybrid exoskeleton with proper weight and size.
According to the collected results, using the adaptive PID instead of the nonadaptive PID did not improve the controller performance. However, adding the PD compensator significantly improved the controller performance. Thus, the controller could not cope with some nonlinear dynamics due to adaptive laws. This finding can be attributed to the structure of the defined Lyapunov function which the adaptation laws were derived using it. The only variable of the defined Lyapunov function is the square value of the tracking error. It can be suggested that the Lyapunov function should be a function of not only the square of error but also a function of the estimation errors of the controller parameters. However, a PD compensator could overcome the mentioned impediment.
Future works can focus on evaluating the proposed control strategy for the multi-joint control system. In other words, concurrently controlling the knee joint and the hip joint is among the next important works. Additionally, evaluating the proposed control strategy for controlling the joint movement with different speeds is the next step of future works. Moreover, the practical implementation of the proper setup for experimental studies is among our perspective works.
5. Conclusion
In this paper, a hybrid-FES control system was proposed to control knee joint movement. The simulation studies on a model of the muscle-joint system indicated the promising performance of the proposed control strategy. Without the presence of the external disturbance, the adopted adaptive PID controller along with a PD compensator could acceptably control the mechanical torque generated by the active actuator. Accordingly, the knee joint movement was controlled with an acceptable value of the tracking error. Besides, during applying the external disturbance a PD controller could control the muscle stimulation intensity in a manner that the disturbance can be rejected and the value of the tracking error was comparable with the situation in which no disturbance was applied. In addition, the implemented decision-making strategy led to coping with the muscle fatigue aroused from the FES delivery.
Ethical Considerations
Compliance with ethical guidelines
There were no ethical considerations to be considered in this research.
Funding
The paper was extracted from the MSc. thesis of the first author at the Department of Biomedical Engineering, Faculty of Engineering, Islamic Azad University, Mashhad Branch, Mashhad.
Authors' contributions
All authors equally contributed to preparing this article.
Conflict of interest
The authors declared no conflict of interest.
References
Anaya, F., Thangavel, P., & Yu, H. (2018). Hybrid FES–robotic gait rehabilitation technologies: A review on mechanical design, actuation, and control strategies. International Journal of Intelligent Robotics and Applications, 2(1), 1-28. https://link.springer.com/article/10.1007/s41315-017-0042-6
Anh, H. P. H., Huan, T. T., & Nam, N. T. (2014). Novel robust walking for biped robot using adaptive neural PID controller. Amsterdam: Atlantis Press. https://www.researchgate.net/profile/Ho-Anh-6/publication/301388154
Bai, S., Virk, G. S., & Sugar, T. G. (Eds.). (2018). Wearable exoskeleton systems: Design, control and applications. IET Digital Library. https://digital-library.theiet.org/
Bortole, M., Venkatakrishnan, A., Zhu, F., Moreno, J. C., Francisco, G. E., & Pons, J. L., et al. (2015). The H2 robotic exoskeleton for gait rehabilitation after stroke: early findings from a clinical study. Journal of Neuroengineering and Rehabilitation, 12(1), 1-14. https://link.springer.com/article/10.1186/s12984-015-0048-y
Chen, G., Qi, P., Guo, Z., & Yu, H. (2016). Mechanical design and evaluation of a compact portable knee–ankle–foot robot for gait rehabilitation. Mechanism and Machine Theory, 103, 51-64. [DOI:10.1016/j.mechmachtheory.2016.04.012]
Del-Ama, A. J., Gil-Agudo, Á., Bravo-Esteban, E., Pérez-Nombela, S., Pons, J. L., & Moreno, J. C. (2015). Hybrid therapy of walking with kinesis overground robot for persons with incomplete spinal cord injury: A feasibility study. Robotics and Autonomous Systems, 73, 44-58. [DOI:10.1016/j.robot.2014.10.014]
del-Ama, A. J., Gil-Agudo, Á., Pons, J. L., & Moreno, J. C. (2014). Characterization of a Dual PID-ILC FES Controller for FES-Robot Control of Swing Phase of Walking. In W. Jensen, O. Kæseler Andersen, M. Akay. Replace, Repair, Restore, Relieve–Bridging Clinical and Engineering Solutions in Neurorehabilitation (pp. 341-349). Cham: Springer. https://link.springer.com/chapter/10.1007/978-3-319-08072-7_54
Ferrarin, M., Palazzo, F., Riener, R., & Quintern, J. (2001). Model-based control of FES-induced single joint movements. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 9(3), 245-57. [DOI:10.1109/7333.948452]
Franken, H. M., Veltink, P. H., Fidder, M., & Boom, H. B. (1993). Fatigue of intermittently stimulated paralyzed human quadriceps during imposed cyclical lower leg movements. Journal of Electromyography and Kinesiology, 3(1), 3-12. [DOI:10.1016/1050-6411(93)90018-R]
Gilbert, M., Zhang, X., & Yin, G. (2016, August). Modeling and design on control system of lower limb rehabilitation exoskeleton robot. In 2016 13th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI) (pp. 348-352). IEEE. [DOI:10.1109/URAI.2016.7734058]
Ha, K. H., Murray, S. A., & Goldfarb, M. (2015). An approach for the cooperative control of FES with a powered exoskeleton during level walking for persons with paraplegia. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 24(4), 455-66. https://ieeexplore.ieee.org/abstract/document/7093196
Kirsch, N. A., Bao, X., Alibeji, N. A., Dicianno, B. E., & Sharma, N. (2017). Model-based dynamic control allocation in a hybrid neuroprosthesis. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 26(1), 224-32. https://ieeexplore.ieee.org/abstract/document/8048522
Kirsch, N., Alibeji, N., & Sharma, N. (2017). Nonlinear model predictive control of functional electrical stimulation. Control Engineering Practice, 58, 319-31. [DOI:10.1016/j.conengprac.2016.03.005]
Parsa, M., & Farrokhi, M. (2010). Robust nonlinear model predictive trajectory free control of biped robots based on nonlinear disturbance observer. In 2010 18th Iranian Conference on Electrical Engineering (pp. 617-622). IEEE. https://ieeexplore.ieee.org/abstract/document/5506996
Ren, Y., & Zhang, D. (2014, August). FEXO Knee: A rehabilitation device for knee joint combining functional electrical stimulation with a compliant exoskeleton. In 5th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics (pp. 683-688). IEEE. https://ieeexplore.ieee.org/abstract/document/6913857
Riener, R., & Edrich, T. (1999). Identification of passive elastic joint moments in the lower extremities. Journal of Biomechanics, 32(5), 539-44. [DOI:10.1016/S0021-9290(99)00009-3]
Shen, D., Sun, W., & Sun, Z. (2014). Adaptive PID formation control of nonholonomic robots without leader's velocity information. ISA transactions, 53(2), 474-80. https://www.sciencedirect.com/science/article/abs/pii/S0019057813002206
Tu, X., Huang, J., & He, J. (2016, August). Leg hybrid rehabilitation based on hip-knee exoskeleton and ankle motion induced by FES. In 2016 International Conference on Advanced Robotics and Mechatronics (ICARM) (pp. 237-242). IEEE. https://ieeexplore.ieee.org/abstract/document/7606925
Wang, H. D., Wu, H. N., Guo, L., & Zhang, L. (2016, July). Nonlinear disturbance observer-based control for a class of nonlinear systems. In 2016 35th Chinese Control Conference (CCC) (pp. 2952-2956). IEEE. [DOI:10.1109/ChiCC.2016.7553812]
Wittmann, R., Hildebrandt, A. C., Wahrmann, D., Rixen, D., & Buschmann, T. (2015, November). Real-time nonlinear model predictive footstep optimization for biped robots. In 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids) (pp. 711-717). IEEE. https://ieeexplore.ieee.org/abstract/document/7363432
Zhang, D., Ren, Y., Gui, K., Jia, J., & Xu, W. (2017). Cooperative control for a hybrid rehabilitation system combining functional electrical stimulation and robotic exoskeleton. Frontiers in Neuroscience, 11, 725. https://www.frontiersin.org/articles/10.3389/fnins.2017.00725/full
In the first section of simulated studies, we assessed the control strategy under the conditions in which no external disturbances were applied. In such a context, the electrical stimulation is not delivered. In other words, only the PID controller was activated. Initially, a nonadaptive PID, then an adaptive PID were used.
As per Figure 5, there existed considerable tracking error and phase delay between the reference knee joint trajectories and the obtained actual.
The calculated RMS of the tracking error was measured as 202 degrees. This finding may be attributed to the nonlinearity of the model, even when no disturbance is applied to the system, appropriate, or acceptable efficiency is not achieved.
As per Figure 6, even when using adaptive control, there exists considerable tracking error and phase delay between the reference knee joint trajectories and the obtained actual.
The tracking performance was improved; however, the calculated RMS of the tracking error equaled 20 degrees. Such an unacceptable performance can be attributed to some system nonlinearity which the controller failed to cope with them.
In the next step, for improving the performance of the adaptive PID, a PD compensator was added. The control signal is the aggregation of the two control signals. One is the adaptive PID output and the other is the compensator output as Equation 16 describes.
According to Figure 7, adopting the PD compensator along with the adaptive PID significantly improved the performance.
The computed RMS of the tracking error was computed as 3. Since the range of knee angle variation is approximately 80 degrees, such a value of the tracking error can be acceptable. In other words, such results can be construed as a sign of good performance of the control strategy. Besides, as expected, the FES controller was deactivated during the control process. No disturbance was applied during the control process.
The RMS of the tracking error while the recorded trajectories related to the different subjects were used as the desired trajectory, were computed. Table 2 presents the computed values.
The computed Mean±SD value was 2.6±0.36. The range of knee angle variation was about 80 degrees; thus, such value of the tracking error can be acceptable. The desired trajectory is related to human data. The human gait is rhythmic and not periodic; therefore, we expect that the controller parameters do not converge to the fixed level. Figure 6 manifests the variations of the adaptive PID parameters during the process. The controller parameters did not converge to the fixed values. Besides, whenever the slope of the desired trajectory changes, the dynamics of parameters variations alter. It reflects the ability of the controller to adapt its behavior according to the different dynamics of the reference trajectory (Figure 8).
In the next step of the research, an external disturbance, as an additive torque was applied to the knee at two-time intervals. Each time interval lasted two seconds. As explained previously, the disturbance dynamics was as Equation 12. Without the presence of the disturbance, using the adaptive PID along with the PD compensator led to the best results. Therefore, in this step, only the adaptive PID along with the PD compensator was evaluated. illustrates a sample achieved result. Firstly, it ranged between 2 to 2.2 s and secondly between 4 to 4.2 s. The external disturbance was applied during two periods. As expected, the FES controller was activated exactly during applying the disturbance. The elicited torque aroused from delivering the electrical stimulation to the muscle has provided the torque, i.e., not generated using the active motor. Once the external disturbance was removed, the stimulation signal was reduced to zero again. The RMS of the tracking error while the recorded trajectories related to the different subjects were used as the desired trajectory, were computed. Table 3 presents the computed values.
The computed average values of the RMS seem to be acceptable if one considers the range of knee joint motion (80 degrees).
As per Figure 9, once the elicited torque aroused from the FES was increased, the generated torque by the active motor significantly decreased.
It indicates that using the FES yields the need for low mechanical power servo-motor for annihilating the disturbance. During applying the disturbance the FES has provided the necessary torque; however, the stability of the control system should also be preserved. Therefore, as Figure 9 shows the variations of the adaptive PID parameters were not stopped even when the FES controller was active. Muscle fatigue is a limiting factor in FES (Franken, Veltink, Fidder, & Boom, 1993). It is expected that in the FES-Hybrid system, incorporating the FES where the FES system is activated only during specific time intervals may lead to postponing the occurrence of muscle fatigue. In the proposed control approach, the FES controller (APD controller) was activated only when an external disturbance was observed. Therefore, it is expected that muscle fatigue can be compensated using the proposed control strategy (Figure 10).
We used a decreasing exponential coefficient in the muscle model to simulate the muscle fatigue process. Figure 11 shows a sample achieved result.
Despite the presence of muscle fatigue, the performance of the controller has not been degraded. Besides, the trend of the motor torque is increasing. It demonstrates the ability of the adaptive PID controller to compensate the muscle fatigue due to gradually increasing the level of the mechanical motor torque.
The RMS of the tracking error while the recorded trajectories related to the different subjects were used as the desired trajectory, were computed. Table 4 indicates the computed values.
The computed average values of the RMS seem to be acceptable if one considers the range of knee joint motion (80 degrees).
4. Discussion
The reference trajectory of knee movement was designed using human data. The situation of the patients may be different in reality, individualizing the exoskeleton makes them more efficient. Therefore, in this simulation study, the controller performance was evaluated while different trajectories related to the different human subjects were used as the desired knee movement trajectory. The specifications of the gait dynamics in each subject differ from the others; thus, assessing the controller under such conditions could elucidate the ability of the proposed control strategy to control the exoskeleton movement in an individualized manner. According to the obtained results, the controller performance was not degraded owing to changing the knee reference trajectory (Tables 2, 3 & 4). Such promising results can hearten us about the prospective application of this control strategy.
In this study, the FES was used along with the active actuator to compensate for the effects of the external disturbance. However, the main limitation of the FES system is expediting the occurrence of muscle fatigue. Therefore, a decision-making approach was applied to activate the FES controller only whenever a designed disturbance observer detects the presence of an external disturbance. Accordingly, the presence of the FES is not only effective but also the occurrence of muscle fatigue can be postponed as much as possible. The achieved results certify the underlying idea. Thus, the value of computed RMS of the tracking error in the presence of the muscle fatigue and the corresponding value computed without the presence of the muscle fatigue are comparable (Table 3 & 4). Such results can prove that the proposed decision-making strategy prevented the rapid occurrence of muscle fatigue. Besides, during applying the disturbance the elicited torque by FES could provide the needed torque. Therefore, a low mechanical power motor can be enough to provide the needed toque to annihilate the external disturbance. This is a considerable benefit because a low mechanical power motor is the low weight with small size which can be useful for implementing an FES-Hybrid exoskeleton with proper weight and size.
According to the collected results, using the adaptive PID instead of the nonadaptive PID did not improve the controller performance. However, adding the PD compensator significantly improved the controller performance. Thus, the controller could not cope with some nonlinear dynamics due to adaptive laws. This finding can be attributed to the structure of the defined Lyapunov function which the adaptation laws were derived using it. The only variable of the defined Lyapunov function is the square value of the tracking error. It can be suggested that the Lyapunov function should be a function of not only the square of error but also a function of the estimation errors of the controller parameters. However, a PD compensator could overcome the mentioned impediment.
Future works can focus on evaluating the proposed control strategy for the multi-joint control system. In other words, concurrently controlling the knee joint and the hip joint is among the next important works. Additionally, evaluating the proposed control strategy for controlling the joint movement with different speeds is the next step of future works. Moreover, the practical implementation of the proper setup for experimental studies is among our perspective works.
5. Conclusion
In this paper, a hybrid-FES control system was proposed to control knee joint movement. The simulation studies on a model of the muscle-joint system indicated the promising performance of the proposed control strategy. Without the presence of the external disturbance, the adopted adaptive PID controller along with a PD compensator could acceptably control the mechanical torque generated by the active actuator. Accordingly, the knee joint movement was controlled with an acceptable value of the tracking error. Besides, during applying the external disturbance a PD controller could control the muscle stimulation intensity in a manner that the disturbance can be rejected and the value of the tracking error was comparable with the situation in which no disturbance was applied. In addition, the implemented decision-making strategy led to coping with the muscle fatigue aroused from the FES delivery.
Ethical Considerations
Compliance with ethical guidelines
There were no ethical considerations to be considered in this research.
Funding
The paper was extracted from the MSc. thesis of the first author at the Department of Biomedical Engineering, Faculty of Engineering, Islamic Azad University, Mashhad Branch, Mashhad.
Authors' contributions
All authors equally contributed to preparing this article.
Conflict of interest
The authors declared no conflict of interest.
References
Anaya, F., Thangavel, P., & Yu, H. (2018). Hybrid FES–robotic gait rehabilitation technologies: A review on mechanical design, actuation, and control strategies. International Journal of Intelligent Robotics and Applications, 2(1), 1-28. https://link.springer.com/article/10.1007/s41315-017-0042-6
Anh, H. P. H., Huan, T. T., & Nam, N. T. (2014). Novel robust walking for biped robot using adaptive neural PID controller. Amsterdam: Atlantis Press. https://www.researchgate.net/profile/Ho-Anh-6/publication/301388154
Bai, S., Virk, G. S., & Sugar, T. G. (Eds.). (2018). Wearable exoskeleton systems: Design, control and applications. IET Digital Library. https://digital-library.theiet.org/
Bortole, M., Venkatakrishnan, A., Zhu, F., Moreno, J. C., Francisco, G. E., & Pons, J. L., et al. (2015). The H2 robotic exoskeleton for gait rehabilitation after stroke: early findings from a clinical study. Journal of Neuroengineering and Rehabilitation, 12(1), 1-14. https://link.springer.com/article/10.1186/s12984-015-0048-y
Chen, G., Qi, P., Guo, Z., & Yu, H. (2016). Mechanical design and evaluation of a compact portable knee–ankle–foot robot for gait rehabilitation. Mechanism and Machine Theory, 103, 51-64. [DOI:10.1016/j.mechmachtheory.2016.04.012]
Del-Ama, A. J., Gil-Agudo, Á., Bravo-Esteban, E., Pérez-Nombela, S., Pons, J. L., & Moreno, J. C. (2015). Hybrid therapy of walking with kinesis overground robot for persons with incomplete spinal cord injury: A feasibility study. Robotics and Autonomous Systems, 73, 44-58. [DOI:10.1016/j.robot.2014.10.014]
del-Ama, A. J., Gil-Agudo, Á., Pons, J. L., & Moreno, J. C. (2014). Characterization of a Dual PID-ILC FES Controller for FES-Robot Control of Swing Phase of Walking. In W. Jensen, O. Kæseler Andersen, M. Akay. Replace, Repair, Restore, Relieve–Bridging Clinical and Engineering Solutions in Neurorehabilitation (pp. 341-349). Cham: Springer. https://link.springer.com/chapter/10.1007/978-3-319-08072-7_54
Ferrarin, M., Palazzo, F., Riener, R., & Quintern, J. (2001). Model-based control of FES-induced single joint movements. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 9(3), 245-57. [DOI:10.1109/7333.948452]
Franken, H. M., Veltink, P. H., Fidder, M., & Boom, H. B. (1993). Fatigue of intermittently stimulated paralyzed human quadriceps during imposed cyclical lower leg movements. Journal of Electromyography and Kinesiology, 3(1), 3-12. [DOI:10.1016/1050-6411(93)90018-R]
Gilbert, M., Zhang, X., & Yin, G. (2016, August). Modeling and design on control system of lower limb rehabilitation exoskeleton robot. In 2016 13th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI) (pp. 348-352). IEEE. [DOI:10.1109/URAI.2016.7734058]
Ha, K. H., Murray, S. A., & Goldfarb, M. (2015). An approach for the cooperative control of FES with a powered exoskeleton during level walking for persons with paraplegia. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 24(4), 455-66. https://ieeexplore.ieee.org/abstract/document/7093196
Kirsch, N. A., Bao, X., Alibeji, N. A., Dicianno, B. E., & Sharma, N. (2017). Model-based dynamic control allocation in a hybrid neuroprosthesis. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 26(1), 224-32. https://ieeexplore.ieee.org/abstract/document/8048522
Kirsch, N., Alibeji, N., & Sharma, N. (2017). Nonlinear model predictive control of functional electrical stimulation. Control Engineering Practice, 58, 319-31. [DOI:10.1016/j.conengprac.2016.03.005]
Parsa, M., & Farrokhi, M. (2010). Robust nonlinear model predictive trajectory free control of biped robots based on nonlinear disturbance observer. In 2010 18th Iranian Conference on Electrical Engineering (pp. 617-622). IEEE. https://ieeexplore.ieee.org/abstract/document/5506996
Ren, Y., & Zhang, D. (2014, August). FEXO Knee: A rehabilitation device for knee joint combining functional electrical stimulation with a compliant exoskeleton. In 5th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics (pp. 683-688). IEEE. https://ieeexplore.ieee.org/abstract/document/6913857
Riener, R., & Edrich, T. (1999). Identification of passive elastic joint moments in the lower extremities. Journal of Biomechanics, 32(5), 539-44. [DOI:10.1016/S0021-9290(99)00009-3]
Shen, D., Sun, W., & Sun, Z. (2014). Adaptive PID formation control of nonholonomic robots without leader's velocity information. ISA transactions, 53(2), 474-80. https://www.sciencedirect.com/science/article/abs/pii/S0019057813002206
Tu, X., Huang, J., & He, J. (2016, August). Leg hybrid rehabilitation based on hip-knee exoskeleton and ankle motion induced by FES. In 2016 International Conference on Advanced Robotics and Mechatronics (ICARM) (pp. 237-242). IEEE. https://ieeexplore.ieee.org/abstract/document/7606925
Wang, H. D., Wu, H. N., Guo, L., & Zhang, L. (2016, July). Nonlinear disturbance observer-based control for a class of nonlinear systems. In 2016 35th Chinese Control Conference (CCC) (pp. 2952-2956). IEEE. [DOI:10.1109/ChiCC.2016.7553812]
Wittmann, R., Hildebrandt, A. C., Wahrmann, D., Rixen, D., & Buschmann, T. (2015, November). Real-time nonlinear model predictive footstep optimization for biped robots. In 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids) (pp. 711-717). IEEE. https://ieeexplore.ieee.org/abstract/document/7363432
Zhang, D., Ren, Y., Gui, K., Jia, J., & Xu, W. (2017). Cooperative control for a hybrid rehabilitation system combining functional electrical stimulation and robotic exoskeleton. Frontiers in Neuroscience, 11, 725. https://www.frontiersin.org/articles/10.3389/fnins.2017.00725/full
Type of Study: Original |
Subject:
Clinical Neuroscience
Received: 2019/05/1 | Accepted: 2021/06/26 | Published: 2021/07/1
Received: 2019/05/1 | Accepted: 2021/06/26 | Published: 2021/07/1
Send email to the article author
| Rights and permissions | |
 |
This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License. |
![]()
Copyright © The Author(s);
This is an open access article distributed under the terms of the Creative Commons Attribution License (CC-By-NC), which permits use, distribution, and reproduction in any medium, provided the original work is properly cited and is not used for commercial purposes.
Contact Information